Sāksim no sākuma – kas ir radars un kāpēc tas vajadzīgs? Pirmkārt, vēlos atzīmēt, ka radars ir specifiska radiotehnikas nozare, kas palīdz noteikt dažādas apkārtējo objektu īpašības. Radara darbība ir vērsta uz radioviļņu nosūtīšanu no objekta uz ierīci.
Radars, radara stacija ir noteikts dažādu ierīču un aparātu kopums, kas ļauj novērot objektus. Radioviļņi, ko piegādā radars, var noteikt pētāmo mērķi un kartēt to detalizēta analīze. Radioviļņi tiek lauzti un it kā “iekrāso” objekta attēlu. Radara stacijas var darboties jebkuros laika apstākļos un lieliski noteikt jebkurus objektus uz zemes, gaisā vai ūdenī.
Radara darbības principi
Darbību sistēma ir vienkārša. Radioviļņi no stacijas tiek novirzīti uz objektiem, kad tie tiek sastapti ar tiem, viļņi tiek lauzti un atspoguļoti atpakaļ radarā. To sauc par radio atbalsi. Lai noteiktu šo parādību, stacijā ir uzstādīti radio raidītāji un radio uztvērēji ar augstu jutību. Iepriekš, tikai pirms pāris gadiem, radaru stacijas prasīja milzīgas izmaksas. Bet ne tagad. Ir nepieciešams ļoti maz laika, lai ierīces pareizi darbotos un objekti tiktu identificēti.
Visas radara darbības balstās ne tikai uz viļņu atstarošanos, bet arī uz to izkliedi.
Kur var izmantot radaru?
Radara sistēmu pielietojuma joma ir diezgan plaša.
- Pirmā nozare būs militārā. Izmanto, lai identificētu zemes, ūdens un gaisa mērķus. Radari uzrauga un apseko teritoriju.
- Lauksaimniecība un mežsaimniecība. Izmantojot šādas stacijas, speciālisti veic pētījumus, lai pētītu augsni un veģetāciju, kā arī atklātu dažāda veida ugunsgrēkus.
- Meteoroloģija. Atmosfēras stāvokļa izpēte un prognožu veidošana, pamatojoties uz iegūtajiem datiem.
- Astronomija. Zinātnieki izmanto radara stacijas, lai pētītu tālu objektus, pulsārus un galaktikas.
Radari automobiļu rūpniecībā
Kopš 2017. gada MAI ir izstrādājusi izstrādnes, kuru mērķis ir izveidot maza izmēra radara stacija pašbraucošām automašīnām. Šādas mazas borta ierīces tuvākajā laikā varēs uzstādīt katrā automašīnā. 2018. gadā jau notiek nestandarta bezpilota lidaparātu radaru testēšana. Plānots, ka šādas ierīces spēs identificēt sauszemes objektus līdz 60 kilometru attālumā, bet jūras objektus - līdz 100 kilometru attālumā.
Ir vērts atgādināt, ka 2017. gadā tika prezentēts arī neliels gaisa divjoslu radars. Unikālā ierīce tika izstrādāta, lai atklātu dažāda veida objektus un priekšmetus jebkuros apstākļos.
Ierīce I – indikators. Mērķis:
Atskaņošana ekrānā primārā informācija par vidi, ko rada radara iekārtas.
Virszemes objektu koordinātu noteikšana un navigācijas uzdevumu risināšana grafiski.
Staciju darba režīmu sinhronizācija un kontrole.
Sprūda impulsu veidošana raidierīcei.
Impulsu ģenerēšana palīgierīču palaišanai.
Kursa signāla impulsu veidošana palīgierīcēm.
Autonomās barošanas nodrošināšana savām vienībām un ierīcēm.
Dizains un darbības princips:
Ierīce I sastāv no šādiem ceļiem un mezgliem:
Laika sinhronizācijas ceļš.
Laika bāzes ceļš.
Novērošanas ierīces ceļš un diapazona marķieri.
Virzienu meklētāja ceļš.
Informācijas ievades ceļš.
Patiesas kustības režīma ceļš.
Diapazona un virziena digitālais displejs.
Katodstaru lampas un novirzes sistēmas.
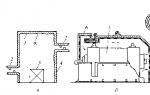
Ierīces darbības princips Un apskatīsim to strukturālā diagramma(1. att.).
Laika sinhronizācijas ceļā ir galvenais oscilators (3G), kas ģenerē galvenos impulsus ar atkārtošanās ātrumu 3000 impulsi/sek - diapazona skalām 1 un 2 jūdzes; 1500 impulsi/sek – 4 un 8 jūdžu svariem; 750 impulsi/sek – svariem 16 un 32 jūdzes; 500 imp/sek 64 jūdžu mērogā. Galvenie impulsi no 3G tiek piegādāti ierīces izvadei, lai iedarbinātu funkcionāli saistītas ierīces (ierīcē P-3); iedarbināt zāģzoba sprieguma ģeneratoru (laika sinhronizācijas ceļā);
Savukārt no Ierīces P-3 ierīces sinhronizācijas ceļā tiek saņemti sekundārie sinhronizācijas impulsi, pateicoties kuriem diapazona un virziena slaucīšanas sākums tiek sinhronizēts ar ierīces A (radara antena) zondēšanas impulsu emisijas sākumu. un tiek palaists novērošanas ierīces un diapazona marķieru ceļš.
Laika slaucīšanas ceļš, izmantojot skenēšanas ģeneratoru, veido un ģenerē zāģa spriegumu, kas pēc virknes transformāciju tiek piegādāts relatīvās kustības novirzes sistēmai katodstaru lampā un virziena meklētāja ceļā.
Tēmēšanas ierīces un attāluma marķieru ceļš ir veidots, lai izveidotu kustīgu attāluma mērītāju (MRF), caur kuru tiek nodrošināta diapazonā esošo objektu saskatīšana, un attāluma mērīšanu veic elektroniskais digitālais skaitītājs. Informācija par diapazonu tiek parādīta digitālajā displejā TsT-3.
Skenēšanas ģeneratora rotējošā transformatora rotors griežas sinhroni un fāzē ar antenu, kas nodrošina skenera un antenas sinhronu griešanos, kā arī atzīmes iegūšanu skenēšanas sākumam uz doto brīdi antenas maksimumu. starojuma modelis šķērso kuģa viduslīnijas plakni.
Virziena meklētāja ceļš sastāv no leņķa sensora, nolasīšanas un dekodēšanas signālu ģeneratoriem un rotējoša transformatora virziena meklētāja skenēšanai. Virziena meklētāja ceļā ģenerētais rotējošā transformatora griešanās leņķis, kas izveidots kodēta signāla veidā, pēc dekodēšanas tiek nosūtīts uz digitālo displeja plati TsT-4.
Informācijas ievades ceļš ir paredzēts, lai CRT ievadītu informāciju par diapazonu un virzienu uz objektu, kā arī parādītu video signālu, kas nāk no ierīces P-3 uz CRT.
Patiesā kustības režīma ceļš ir paredzēts, lai ievadītu datus par ātrumu V s - no žurnāla, kursu K s no žirokompasa, ko izmanto, lai ģenerētu ātruma vektora komponentus skalā N - S un E virzienos. - W; lai nodrošinātu sava kuģa atzīmes kustību CRT ekrānā atbilstoši izvēlētajam mērogam, ceļš paredz arī automātisku un manuālu paša kuģa atzīmes atgriešanos sākuma punktā.
Ierīce P-3 – raiduztvērējs. Mērķis:
Ierīce P-3 (uztvērējs) ir paredzēta:
Mikroviļņu zondēšanas impulsu veidošana un ģenerēšana;
Atstaroto radara signālu uztveršana, pastiprināšana un pārveidošana video signālā.
Nodrošinot visu ierīču bloku un bloku sinhrono un vienfāzu darbību laikā: I; P – 3; A.
Ierīces sastāvs:
· mikroviļņu bloks – 3 (ultraaugstas frekvences vienība).
· MP bloks (raidītāja modulators).
· FM bloks (modulatora filtrs).
· AFC vienība (automātiskā frekvences regulēšanas vienība)
· UR bloks (regulējams pastiprinātājs)
· UG bloks (galvenais pastiprinātājs)
· NK vienība – 3 (regulēšanas un vadības bloks)
· ACS bloks (automātiskais stabilizācijas un vadības bloks)
· FS apakšvienība (pulksteņa impulsu veidotājs)
· 4 taisngriežu ierīces, kas nodrošina strāvas padevi ierīces P – 3 blokiem un ķēdēm.
Apskatīsim ierīces darbību tās blokshēmā.

Stabilizācijas signāla ģenerēšanas ceļš ir paredzēts, lai ģenerētu sekundāros sinhronizācijas impulsus, kas nonāk ierīcē, kā arī iedarbinātu raidītāja modulatoru caur automātiskās stabilizācijas vadības bloku. Ar šo sinhronizācijas impulsu palīdzību tiek nodrošināta zondēšanas impulsu sinhronizācija ar skenēšanas sākumu I ierīces CRT.
Zondēšanas impulsu ģenerēšanas ceļš ir paredzēts, lai ģenerētu mikroviļņu impulsus un pārraidītu tos pa viļņvadu uz ierīci A. Tas notiek pēc tam, kad sprieguma modulators ģenerē mikroviļņu ģeneratora impulsu modulāciju, kā arī savienojošo bloku un mezglu vadības un sinhronizācijas impulsus.
Video signāla ģenerēšanas ceļš ir paredzēts, lai pārveidotu atstarotos mikroviļņu impulsus starpfrekvences impulsos, izmantojot lokālo oscilatoru un maisītājus, veidojot un pastiprinot video signālu, kas pēc tam nonāk ierīcē I. Lai pārraidītu zondēšanas impulsus uz ierīci A un atstarotos impulsus, tiek izmantots kopīgs viļņvads. uz video signāla ģenerēšanas ceļu.
Vadības un barošanas avota iestatīšanas ceļš ir paredzēts, lai ģenerētu barošanas spriegumus visiem ierīces blokiem un shēmām, kā arī lai uzraudzītu barošanas avotu, funkcionālo bloku un stacijas komponentu, magnetrona, lokālā oscilatora, dzirksteļu spraugas u.c.
Ierīce A ir antenas ierīce. Mērķis:
Ierīce A ir paredzēta mikroviļņu enerģijas impulsu izstarošanai un saņemšanai, kā arī datu izvadīšanai par antenas virziena leņķi un virziena atzīmi uz ierīci I. Tā ir raga tipa slota antena.
Ierīces A pamatdati.
Sijas platums:
Horizontālajā plaknē – 0,7° ± 0,1
Vertikālā plaknē - 20° ± 0,1
Antenas griešanās frekvence 19 ± 4 apgr./min.
Darba temperatūra svārstās no -40°C līdz +65°C
Izmēri:
Garums – 833 mm
Platums – 3427 mm
Augstums - 554 mm
Svars - 104 kg.
Strukturāli ierīce ir izgatavota 2 noņemamu bloku veidā;
PA bloks – rotējoša antenas daļa
AR bloks - veic: mikroviļņu enerģijas veidošanos vajadzīgās formas radio stara veidā; virzīta enerģijas izstarošana kosmosā un tās virzīta uztveršana pēc atstarošanas no apstarotiem objektiem.
Ierīces A darbība.
Ierīces PA blokā ir uzstādīts elektromotors ar pārnesumkārbu. Elektromotors tiek darbināts no kuģa tīkla un nodrošina ierīces A AR bloka apļveida rotāciju. Elektromotors caur pārnesumkārbu griež arī rotējošā transformatora rotoru, no kura ierīce I caur izsekošanas sistēmu saņem signālu. par antenas leņķisko stāvokli attiecībā pret kuģa DP (kursa leņķi), kā arī kuģa kursa signālu. PA blokā ir arī rotējošs mikroviļņu savienojums, kas paredzēts, lai savienotu rotējošu emitētāju (AR bloku) ar stacionāru viļņvada ceļu.
AR vienība, kas ir slota antena, veido vajadzīgās formas virziena radiostaru. Radio stars izstaro mikroviļņu enerģiju kosmosā un nodrošina virziena uztveršanu šīs mikroviļņu enerģijas daļai, kas atspoguļota no apstarotajiem objektiem. Atspoguļotais signāls caur kopēju viļņvadu nonāk P-3 ierīcē, kur pēc virknes transformāciju pārvēršas video signālā.
PA blokā ir arī termiskais elektriskais sildītājs (TEH), kas paredzēts, lai novērstu ierīces A kustīgo daļu apledojuma risku, un filtrs rūpniecisko radio traucējumu novēršanai.
KU ierīce ir kontaktora ierīce. Mērķis:
KU ierīce (kontaktora ierīce) ir paredzēta, lai savienotu radaru ar borta tīklu, pārslēgtu mašīnas bloka izejas spriegumu, aizsargātu antenas piedziņu no pārslodzes un aizsargātu radaru, ja tiek pārkāpta tā izslēgšanas kārtība, kā arī aizsargāt staciju borta tīkla avārijas izslēgšanas gadījumā.
Ierīce radara ierīcēm nodrošina maiņstrāvas spriegumu 220 V ar frekvenci 400 Hz 3 ÷ 6 sekundes pēc mašīnas bloka ieslēgšanas.
Borta tīkla avārijas izslēgšanas gadījumā ierīce izslēdz patērētājus 0,4 ÷ 0,5 s laikā.
Ierīce izslēdz antenas piedziņu pēc 5 ÷ 20 sekundēm. nepareizas fāzes rotācijas gadījumā, pārrāvuma gadījumā vienā no fāzēm un antenas piedziņas slodzes strāvas palielināšanās gadījumā.
Pārveidotājs VISS – 1,5m. Mērķis:
Pārveidotājs ir paredzēts, lai pārveidotu trīsfāzu strāvu ar frekvenci 50 Hz par vienfāzes AC spriegums 220 V, frekvence 427 Hz. Tā ir mašīnas iekārta, uz kuras vārpstas ir trīsfāžu sinhronais motors un vienfāzes sinhronais ģenerators.
Pārveidotājs nodrošina lokālu un attālinātu barošanas bloka iedarbināšanu un apturēšanu.
RADARA DARBĪBAS VADĪBA.
Radara darbība tiek vadīta no I ierīces paneļa un vadības paneļa.
Vadības elementi ir sadalīti operatīvās un palīgierīces.
Izmantojot operatīvi vadīklas:
Stacija ieslēdzas un izslēdzas. (27)
Diapazona skalu slēdzis. (14)
Attālumus līdz mērķiem mēra, izmantojot attāluma mērītāju. (15)
Mērķu virziena leņķi un gultņi tiek noteikti, izmantojot elektroniskos un mehāniskos virziena meklētājus. (28), (29)
Kursa atzīmēšana ir atspējota. (7)
Tie kontrolē radara signālu atšķirtspēju (pastiprinājumu) un trokšņu noturību. (8, 9, 10, 11, 12, 13)
Tiek regulēts paneļa un skalu fona apgaismojuma spilgtums. (2)
Izmantojot palīgierīce vadīklas:
Antenas rotācija tiek ieslēgta un izslēgta. (26)
Savienojums starp indikatoru un žurnālu un žiroskopa kompasu ir ieslēgts.
Tiek saskaņoti virziena skatu meklētāja kustīgās skalas rādījumi. (29)
Slaucīšanas un kursa atzīmju spilgtums ir regulējams. (22, 23)
AFC ir izslēgts un ir ieslēgts manuālais režīms vietējā oscilatora frekvences regulēšanai. (27)
Skenera rotācijas centrs ir saskaņots ar virziena meklētāja ģeometrisko centru. (20)
Ierīces P-3 lokālais oscilators ir noregulēts.
Ir ieslēgts radara vispārējās darbības uzraudzības režīms. (16, 17, 18, 19)
Strāvas padeve P-3 ierīces modulatoram ir izslēgta.
CRT ekrāna spilgtums ir iestatīts un stars ir fokusēts.
Antenas rotators ir ieslēgts. (26)
KU ierīcē ir ieslēgta antenas apkure
Vadības elementu atrašanās vieta uz tālvadības pults un indikatoru paneļa ir parādīta attēlā.
 3. att. Naiad-5 radara indikatora vadības panelis:
3. att. Naiad-5 radara indikatora vadības panelis:
1-“Mērogu apgaismojums”; 2-“Paneļa fona apgaismojums”; 3-“grādi”; 4-"Mērogs - intervāls"; 5-"Jūdzes"; 6-“PZ”; 7-“Kursa atzīme”; 8-"Lietus"; 9-“Spilgtums VN”; 10-“VD spilgtums”; 11-“Brightness MD”; 12-"Viļņi"; 13-“Stiprināšana”; 14-“Diapazona skalas slēdzis”; 15-"Diapazons"; 16-"Bloki"; 17-"Taisngrieži"; 18-"Kontrole"; 19-"Rādītāja indikators"; 20-“Centra iestatīšana”; 21-“RFC-Off”; 22-“Spilgtums ir kārtībā”; 23-“Skenēšanas spilgtums”; 24-“viltus signāli”; 25-"Radara vadība"; 26-“Antena – izslēgta”; 27-"Izslēgts radars"; 28-“Mehāniskais tēmēklis”; 29-“Virziens”; 30-"Kurss-Ziemeļi-Ziemeļi-ID"; 31-“Atiestatīt uz centru”; 32-“Atiestatīt”; 33-“Centra maiņa”; 34-“Nojaukšanas uzskaite”; 35 — "Manuālais ātrums"
RADARU APKOPE.
Pirms radara ieslēgšanas jums ir:
Ražot ārējā pārbaude un pārliecinieties, ka ierīcēm un iekārtai nav ārēju bojājumu.
Iestatiet vadības ierīces tabulā parādītajās pozīcijās.
| Pārvaldes institūcijas nosaukums | Vadības ierīču novietojums pirms indikatora ieslēgšanas |
| Pārslēgt slēdzi "Radars - izslēgts" | Poga “Lietus” “VN Brightness” poga “VD Brightness” poga “MD Brightness” poga “Wave” poga “Gain” poga “Scales illumination” poga “Sweep brightness, OK” poga “Course – North – North ID” slēdzis Poga “ Atiestatīt uz centru" Regulatori "Centra maiņa" Regulatori "Ņemot vērā dreifēšanu: ātrums, virziens" Regulators "Ātrums manuāli" Poga "Nepatiesi signāli" Pārslēgšanas slēdzis "Žirokompass - izslēgts" |
Pārslēgt slēdzi "Antena - izslēgts"
"Izslēgts"
Vistālāk kreisajā pusē vidējais vidējais kreisais vidējais vidējais rūpnīcas fiksētais “kurss” iespējots Vidējais 0 digitalizētā mērogā 0 digitalizētā mērogā Iespējots “Izslēgts”
"Izslēgts"
Pārējās vadības ierīces var palikt jebkurā pozīcijā.
Stacijas ieslēgšana.
Borta sprieguma slēdzis ir iestatīts pozīcijā “Ieslēgts” (barošanas bloks ieslēdzas)
Uz indikatora:
Pārslēdziet "Radars - izslēgts" iestatīts radara pozīcijā
Pārslēgt slēdzi "Antena - izslēgta" iestatīts uz antenas pozīciju.
Ieslēdziet darbības pogu P - 3 (jāiedegas skalas mehānismam un paskaidrojošiem uzrakstiem).
Pēc 1,5 ÷ 2,5 minūtēm. CRT ekrānā jāparāda rotējoša skenēšana, kursa atzīme, diapazona atzīmes un virziena līnija.
Pēc 4 minūtēm jāparādās zondēšanas impulsa atzīmei un radara skatīšanās zonā esošo objektu atzīmēm.
Izmantojot atbilstošās vadības ierīces, izvēlieties optimālo HV spilgtumu; VD; MD; un “Vilņa” pozīcija.
Raiduztvērējs tiek ieslēgts, izmantojot spiedpogu slēdzi. (6)
Attēla orientāciju attiecībā pret patieso meridiānu (ziemeļiem) vai attiecībā pret kuģa centra plakni (kursu) relatīvās kustības režīmā veic ar slēdzi 30, iestatot to pozīcijā “ziemeļi” vai “kurss”. Ar to pašu slēdzi, iestatot to pozīcijā “ziemeļi - ID”, patiesās kustības režīms tiek nodrošināts skalā 1; 2; 4; 8 jūdzes.
Slaucīšanas centrs tiek pārvietots uz izvēlēto punktu ar potenciometriem (33)
Skenēšanas sākums (centrs) atgriežas CRT centrā ar pogām 31 un 32.
Pašu kuģa ātruma datus var ievadīt manuāli (35)
Mērītā attāluma līdz mērķim digitālā indikācija un virziena indikācija tiek veikta digitālajos displejos TsT - 3 un TsT - 4 (3; 5)
Radara darbības uzraudzību veic iebūvēta sistēma, kas nodrošina kopējās darbības uzraudzību un traucējummeklēšanu (16; 17; 18; 19;)
Viņi ir pārliecināti par iespēju: kontrolēt ātrgaitas diapazona tēmēkļus un augstsprieguma virzienu, kā arī izslēgt kursa atzīmi un mainīt skalu, pārslēdzot diapazona skalas.
Pārbaudiet: slaucīšanas sākuma izlīdzināšana ar ekrāna centru (divās savstarpēji perpendikulārās virziena meklētāja pozīcijās 4 jūdžu skalā). Attēla orientācijas shēmas darbība (žirokompass ir izslēgts, slēdzis "kurss - ziemeļi - ziemeļi ID" tiek iestatīts pārmaiņus pozīcijās "kurss" un "ziemeļi", pārliecinoties, ka kursa atzīme maina savu pozīciju). Pēc tam iestatiet pārslēgšanas slēdzi pozīcijā “žirokompass” un pārliecinieties, ka kursa līnijas pozīcija atbilst galvenā akumulatora atkārtotāja rādījumiem.
Pārbaudiet skenēšanas rotācijas centra nobīdi OD režīmā (rokturis "atiestatīt uz centru" ir iestatīts izslēgtā pozīcijā, "centra maiņas" rokturis vienmērīgi pārvieto skenēšanas centru pa kreisi un pa labi par 2 /3 no CRT rādiusa, tas viss tiek veikts ar 1 8 jūdžu diapazona skalām, ja tiek orientēts pārmaiņus pa "kursu" un "ziemeļiem";
Izmantojot pogu “atiestatīt uz centru”, es atkal izlīdzinu skenēšanas centru ar “CRT ekrāna” centru.
Šim nolūkam viņi pārbauda indikatora darbību ID režīmā: iestatiet slēdzi režīmā “ziemeļi - ID”, diapazona skala ir iestatīta uz 1 jūdzi, izslēdziet žurnālu un žirokompasu, pogu “drift accounting” nulles pozīcija, manuāli iestatiet patvaļīgu ātruma vērtību, izmantojot pogu “atiestatīt” uz centru, pārliecinieties, ka slaucīšanas sākums ekrānā virzās pa kursu ar iestatīto ātrumu. Kad kustība sasniedz 2/3 no CRT rādiusa, skenēšanas centram automātiski jāatgriežas ekrāna centrā. Slaucīšanas sākuma atgriešana sākuma punktā ir jānodrošina arī, manuāli nospiežot pogu “atiestatīt”.
Izmantojiet “drift accounting” pogas, lai ievadītu patvaļīgu vērtību kursa un ātruma korekcijām, un pārliecinieties, vai tas maina parametrus skenēšanas sākuma pārvietošanai CRT ekrānā.
Slēdzis “kurss – ziemeļi – ziemeļu ID” ir iestatīts pozīcijā “kurss” vai “ziemeļi”. Šādā gadījumā slaucīšanas sākumam ir jāpārvietojas uz ekrāna centru un jāieslēdzas OD režīmam. Tam pašam jānotiek, iestatot diapazona skalas uz 16; 32; 64 jūdzes.
Pārbaudiet skenēšanas sākuma manuālo nobīdi ID režīmā: izslēdziet pogu “atiestatīt uz centru”, iestatiet “centra nobīdes” vadīklas pozīcijā, kas nodrošina skenēšanas sākuma nobīdi par mazāku 2/3 no CRT rādiusa, nospiediet pogu “atiestatīt” un pārliecinieties, vai centra slaucīšana ir pārvietota uz izvēlēto punktu un sāka virzīties uz dots virziens. Pārbīdot par 2/3 no ekrāna rādiusa, skenēšanas centrs automātiski atgriežas izvēlētajā punktā.
Stacijas darbību uzrauga iebūvēta sistēma, kas nodrošina uzraudzību un problēmu novēršanu. Sistēma sastāv no elementiem, kas iekļauti kā atsevišķas vienības ierīcēs un staciju blokā.
Ierīces P-3 veiktspēja tiek uzraudzīta, izmantojot tajā esošo NK-3 bloku, kas pārbauda barošanas bloku un funkcionālo bloku un mezglu izmantojamību.
I ierīces veiktspējas uzraudzība un bojāta barošanas avota vai funkcionālā bloka meklēšana tiek veikta, izmantojot iebūvēto vadības bloku, kas atrodas I ierīces vadības panelī.
STACIJA IR IZSLĒGTA:
· Strāvas atslēgšana, izmantojot pārslēgšanas slēdzi “Radars – off”.
· Borta tīkla sprieguma atvienošana (starta “stop” poga)
· Sprieguma atvienošana no sakaru elementiem ar baļķi un žirokompasu.
Radara stacija
Šeit tiek novirzīts pieprasījums pēc "radara"; par reģistru zāles Skatīt Zāļu reģistru.
Radara stacija(radars) vai radars(angļu valodā) radars no R.A. dio D atklāšanu A nd R makšķerēšana- radio noteikšana un attāluma noteikšana) - sistēma gaisa, jūras un zemes objektu noteikšanai, kā arī to diapazona, ātruma un ģeometrisko parametru noteikšanai. Izmanto metodi, kuras pamatā ir radioviļņu izstarošana un to atstarojumu reģistrēšana no objektiem. Angļu valodas termins-akronīms parādījās 1941. gadā, tā rakstībā lielie burti tika aizstāti ar mazajiem burtiem.
Stāsts
PSRS un Krievijā
Padomju Savienībā izpratne par to, ka ir nepieciešami gaisa kuģu noteikšanas līdzekļi, kas brīvi no skaņas un optiskās novērošanas trūkumiem, izraisīja pētījumu attīstību radaru jomā. Jaunā artilērista Pāvela Oščepkova piedāvātā ideja saņēma augstākās komandas apstiprinājumu: PSRS aizsardzības tautas komisārs K. E. Vorošilovs un viņa vietnieks M. N. Tuhačevskis.
1946. gadā amerikāņu speciālisti - Raimonds un Hahertons, bijušais darbinieks ASV vēstniecība Maskavā rakstīja: "Padomju zinātnieki veiksmīgi izstrādāja radara teoriju vairākus gadus pirms radara izgudrošanas Anglijā."
Klasifikācija
Atbilstoši pielietojuma jomai tie atšķiras- militārs;
- civilā;
- noteikšanas radars;
- Kontroles un izsekošanas radars;
- Panorāmas radari;
- Sānu skata radars;
- meteoroloģiskie radari;
- Mērķa apzīmēšanas radars;
- Situācijas novērošanas radars;
- Piekrastes radari
- Jūras spēku radari
- Gaisa radari
- Mobilie radari
- Primārais vai pasīvs
- Sekundārais vai aktīvs
- Kombinēts
- Virs horizonta radars
- Mērītājs
- decimetrs
- Centimetrs
- Milimetrs
Primārā radara dizains un darbības princips
Primārais (pasīvais) radars galvenokārt kalpo mērķu noteikšanai, apgaismojot tos ar elektromagnētisko viļņu un pēc tam saņemot šī viļņa atstarojumus (atbalsis) no mērķa. Jo ātrums elektromagnētiskie viļņi konstante (gaismas ātrums), kļūst iespējams noteikt attālumu līdz mērķim, pamatojoties uz dažādu signāla izplatīšanās parametru mērījumiem.
Radara stacijas pamatā ir trīs komponenti: raidītājs, antena un uztvērējs.
Raidītājs(raidīšanas ierīce) ir lielas jaudas elektromagnētiskā signāla avots. Tas var būt spēcīgs impulsu ģenerators. Impulsa centimetru diapazona radariem tas parasti ir magnetrons vai impulsu ģenerators, kas darbojas pēc šādas shēmas: galvenais oscilators ir jaudīgs pastiprinātājs, kas visbiežāk kā ģeneratoru izmanto ceļojošo viļņu lampu, bet metru diapazona radariem - triode. bieži lietots. Atkarībā no konstrukcijas raidītājs darbojas vai nu impulsa režīmā, ģenerējot atkārtotus īsus spēcīgus elektromagnētiskos impulsus, vai arī izstaro nepārtrauktu elektromagnētisko signālu.
Antena veic raidītāja signāla fokusēšanu un starojuma shēmas veidošanu, kā arī no mērķa atstarotā signāla uztveršanu un šī signāla pārraidīšanu uztvērējam. Atkarībā no realizācijas atstaroto signālu var uztvert vai nu ar to pašu antenu, vai ar citu, kas dažkārt var atrasties ievērojamā attālumā no raidierīces. Ja pārraide un uztveršana tiek apvienota vienā antenā, šīs abas darbības tiek veiktas pārmaiņus, un, lai spēcīgais signāls, kas noplūst no raidītāja raidītāja uz uztvērēju, neapžilbinātu uztvērēju no vājas atbalss, tiek novietota īpaša ierīce. uztvērējs, aizverot uztvērēja ieeju zondēšanas signāla emisijas brīdī.
Uztvērējs (uztveršanas ierīce) veic saņemtā signāla pastiprināšanu un apstrādi. Pašā vienkāršs gadījums iegūtais signāls tiek ievadīts stara caurulē (ekrānā), kas parāda attēlu, kas sinhronizēts ar antenas kustību.
Dažādi radari ir balstīti uz dažādām metodēm atstarotā signāla mērīšanai:
Frekvences metode
Frekvenču diapazona mērīšanas metode ir balstīta uz emitēto nepārtraukto signālu frekvences modulācijas izmantošanu. Izmantojot šo metodi, frekvence tiek izstarota laika posmā, kas lineāri mainās no f1 līdz f2. Atspoguļotais signāls pienāks modulēts lineāri laika momentā pirms pašreizējā ar aizkaves laiku. Tas. radara uztvertā atstarotā signāla frekvence būs proporcionāli atkarīga no laika. Aizkaves laiku nosaka krasas atšķirības signāla frekvences izmaiņas.
Priekšrocības:
- ļauj izmērīt ļoti mazus diapazonus;
- tiek izmantots mazjaudas raidītājs;
Trūkumi:
- nepieciešamas divas antenas;
- uztvērēja jutības pasliktināšanās sakarā ar noplūdi caur antenu raidītāja starojuma uztveršanas ceļā, pakļaujoties nejaušām izmaiņām;
- augstas prasības frekvences izmaiņu linearitātei;
Šie ir tā galvenie trūkumi.
Fāzes metode
Fāzes (koherentā) radara metode ir balstīta uz fāzes starpības izolēšanu un analīzi starp nosūtītajiem un atstarotajiem signāliem, kas rodas Doplera efekta dēļ, kad signāls tiek atstarots no kustīga objekta. Šajā gadījumā raidīšanas ierīce var darboties gan nepārtraukti, gan impulsa režīmā. Šīs metodes galvenā priekšrocība ir tā, ka tā "ļauj novērot tikai kustīgus objektus, un tas novērš traucējumus no stacionāriem objektiem, kas atrodas starp uztveršanas aprīkojumu un mērķi vai aiz tā."
Tā kā tiek izmantoti ultraīsie viļņi, nepārprotams diapazona mērījumu diapazons ir vairāki metri. Tāpēc praksē tiek izmantotas sarežģītākas shēmas, kurās ir divas vai vairākas frekvences.
Priekšrocības:
- mazjaudas starojums, jo tiek radītas neslāpētas svārstības;
- precizitāte nav atkarīga no atstarojuma Doplera frekvences nobīdes;
- diezgan vienkārša ierīce;
Trūkumi:
- diapazona izšķirtspējas trūkums;
- uztvērēja jutības pasliktināšanās, ko rada raidītāja starojuma iekļūšana caur antenu uztveršanas ceļā, pakļaujot nejaušām izmaiņām;
Pulsa metode
Mūsdienu izsekošanas radari ir veidoti kā impulsa radari. Impulsa radars pārraida pārraides signālu tikai ļoti īsu laiku, īsā impulsā (parasti apmēram mikrosekundē), pēc tam tas pāriet uztveršanas režīmā un klausās atbalsi, kas atstaro no mērķa, kamēr izstarotais impulss izplatās kosmosā.
Tā kā impulss pārvietojas tālu no radara ar nemainīgu ātrumu, laiks, kas paiet no impulsa nosūtīšanas brīža līdz atbalss atbildes saņemšanai, ir tieša atkarība no attāluma līdz mērķim. Nākamo impulsu var nosūtīt tikai pēc kāda laika, proti, pēc impulsa atgriešanās (tas ir atkarīgs no radara noteikšanas diapazona, raidītāja jaudas, antenas pastiprinājuma, uztvērēja jutības). Ja impulss tiek nosūtīts agrāk, iepriekšējā impulsa atbalss no attāla mērķa var tikt sajaukts ar otra impulsa atbalsi no tuva mērķa.
Laika intervālu starp impulsiem sauc pulsa atkārtošanās intervāls, tā abpusējs ir svarīgs parametrs, ko sauc pulsa atkārtošanās ātrums(CPI) . Liela diapazona zemas frekvences radariem parasti atkārtošanās intervāls ir vairāki simti impulsu sekundē. Impulsu atkārtošanās ātrums ir viena no raksturīgajām iezīmēm, ar kuras palīdzību ir iespējams attālināti noteikt radara modeli.
Impulsu diapazona mērīšanas metodes priekšrocības:
- iespēja izveidot radaru ar vienu antenu;
- indikatora ierīces vienkāršība;
- Vairāku mērķu diapazona mērīšanas ērtība;
- emitēto impulsu, kas ilgst ļoti īsu laiku, un saņemto signālu vienkāršība;
Trūkumi:
- Nepieciešamība izmantot lielu raidītāja impulsu jaudu;
- nespēja izmērīt nelielus diapazonus;
- liela mirušā zona;
Pasīvo traucējumu noņemšana
Viena no galvenajām impulsa radaru problēmām ir atbrīvošanās no signāla, kas atstarojas no stacionāriem objektiem: zemes virsma, augsti kalni utt. Ja, piemēram, lidmašīna atrodas pret augstu kalnu, no šī kalna atstarotais signāls pilnībā bloķēs signālu no lidmašīnas. Uz zemes izvietotajiem radariem šī problēma izpaužas, strādājot ar zemu lidojošiem objektiem. Gaisa impulsa radariem tas izpaužas ar to, ka atstarojums no zemes virsmas aizsedz visus objektus, kas atrodas zem lidmašīnas ar radaru.
Metodes, kā novērst traucējumu izmantošanu, vienā vai otrā veidā, Doplera efekts (no tuvojoša objekta atstarotā viļņa frekvence palielinās, un no aizejoša objekta tā samazinās).
Vienkāršākais radars, kas var noteikt traucējošo mērķi, ir radars ar kustīga mērķa izvēli(PDS) - impulsa radars, kas salīdzina atstarojumus no vairāk nekā diviem vai vairākiem impulsu atkārtošanās intervāliem. Jebkurš mērķis, kas pārvietojas attiecībā pret radaru, rada izmaiņas signāla parametrā (sērijas SDC posms), kamēr traucējumi paliek nemainīgi. Traucējumu novēršana notiek, atņemot atstarojumus no diviem secīgiem intervāliem. Praksē trokšņu novēršanu var veikt īpašās ierīcēs - caurperioda kompensatoros vai programmatūras algoritmos.
CRT operētājsistēmām ir būtisks trūkums: tās neredz mērķus ar noteiktu apļveida ātrumu (kas rada tieši 360 grādu fāzes izmaiņas), un šādi mērķi netiek attēloti. Ātrums, ar kādu mērķis pazūd radaram, ir atkarīgs no stacijas darbības frekvences un impulsa atkārtošanās ātruma. Mūsdienu PRF izstaro vairākus impulsus ar atšķirīgu atkārtošanās ātrumu - tā, ka neredzamo ātrumu katrā impulsa atkārtošanās ātrumā uztver citi PRF.
Vēl viens veids, kā atbrīvoties no traucējumiem, ir ieviests impulsa Doplera radari, kas izmanto ievērojami sarežģītāku apstrādi nekā radari ar SDC.
Svarīga impulsa Doplera radaru īpašība ir signāla saskaņotība. Tas nozīmē, ka nosūtītajiem signāliem un atspīdumiem ir jābūt noteiktai fāzes atkarībai.
Impulsa Doplera radari parasti tiek uzskatīti par labākiem par MDT radariem zemu lidojošu mērķu noteikšanā vairākos zemes jucekli, un tie ir vēlamais paņēmiens, ko mūsdienu iznīcinātāju lidmašīnās izmanto gaisa pārtveršanai/uguns kontrolei (piemēri ir AN/APG-63, 65, 66, 67 un 70 radari). Mūsdienu Doplera radarā lielāko daļu apstrādes veic atsevišķs procesors digitālā forma izmantojot digitālos signālu procesorus, parasti izmantojot augstas veiktspējas ātrās Furjē pārveidošanas algoritmu, lai pārveidotu atstarošanas modeļu digitālos datus par kaut ko vieglāk pārvaldāmu ar citiem algoritmiem. Digitālie signālu procesori ir ļoti elastīgi, jo tajos izmantotos algoritmus var ātri aizstāt ar citiem, mainot tikai programmu ierīces atmiņā (“firmware” ROM), tādējādi, ja nepieciešams, ātri pielāgojoties ienaidnieka traucēšanas tehnikai.
Radara diapazoni
| Diapazons | Etimoloģija | Frekvences | Viļņa garums | Piezīmes |
|---|---|---|---|---|
| HF | angļu valoda augsta frekvence | 3-30 MHz | 10-100 m | Krasta apsardzes radari, "virs horizonta" radari |
| P | angļu valoda iepriekšējā | < 300 МГц | > 1 m | Izmanto agrīnajos radaros |
| VHF | angļu valoda ļoti augsta frekvence | 50-330 MHz | 0,9-6 m | Liela attāluma noteikšana, Zemes izpēte |
| UHF | angļu valoda īpaši augsta frekvence | 300-1000 MHz | 0,3-1 m | Atklāšana lielos attālumos (piemēram, artilērijas apšaude), mežu, Zemes virsmas izpēte |
| L | angļu valoda Gari | 1-2 GHz | 15-30 cm | gaisa satiksmes uzraudzība un kontrole |
| S | angļu valoda Īss | 2-4 GHz | 7,5-15 cm | gaisa satiksmes vadība, meteoroloģija, jūras radars |
| C | angļu valoda Kompromiss | 4-8 GHz | 3,75-7,5 cm | meteoroloģija, satelīta apraide, vidējais diapazons starp X un S |
| X | 8-12 GHz | 2,5-3,75 cm | ieroču kontrole, raķešu vadība, jūras radars, laikapstākļi, vidējas izšķirtspējas kartēšana; ASV lidostu radaros izmanto 10,525 GHz ± 25 MHz joslu | |
| K u | angļu valoda zem K | 12-18 GHz | 1,67-2,5 cm | kartēšana augsta izšķirtspēja, satelīta altimetrija |
| K | vācu kurz- "īss" | 18-27 GHz | 1,11-1,67 cm | lietošana ir ierobežota spēcīgas ūdens tvaiku absorbcijas dēļ, tāpēc tiek izmantoti K u un K a diapazoni. K-joslu izmanto mākoņu noteikšanai, policijas satiksmes radaros (24,150 ± 0,100 GHz). |
| K a | angļu valoda virs K | 27-40 GHz | 0,75-1,11 cm | Kartēšana, neliela attāluma gaisa satiksmes vadība, speciālie radari, kas kontrolē satiksmes kameras (34.300 ± 0.100 GHz) |
| mm | 40-300 GHz | 1-7,5 mm | milimetru viļņi, kas sadalīti šādos divos diapazonos | |
| V | 40-75 GHz | 4,0-7,5 mm | EHF medicīniskās ierīces, ko izmanto fizioterapijai | |
| W | 75-110 GHz | 2,7-4,0 mm | sensori eksperimentālos automatizētos transportlīdzekļos, augstas precizitātes laikapstākļu izpēte |
Sekundārais radars
"Sekundārais radars" tiek izmantots aviācijā gaisa kuģu identificēšanai. Galvenā iezīme ir aktīva transpondera izmantošana lidmašīnā.
Sekundārā radara darbības princips nedaudz atšķiras no primārā radara principa. Sekundārās radara stacijas pamatā ir šādas sastāvdaļas: raidītājs, antena, azimuta marķieru ģeneratori, uztvērējs, signālu procesors, indikators un gaisa kuģa transponderis ar antenu.
Raidītājs- kalpo pieprasījuma impulsu izstarošanai antenā ar frekvenci 1030 MHz
Antena- kalpo atstarotā signāla izstarošanai un uztveršanai. Saskaņā ar ICAO sekundāro radaru standartiem, antena izstaro ar frekvenci 1030 MHz un saņem ar frekvenci 1090 MHz.
Azimuta marķieru ģeneratori- kalpo ģenerēšanai azimuta zīmes (Azimuta maiņas impulss vai ĀKK) un paaudze Ziemeļu zīmes (Azimuta atsauces impulss vai ARP). Vienā revolūcijā radara antenas Tiek ģenerētas 4096 mazas azimuta atzīmes (vecām sistēmām) vai 16384 mazas azimuta atzīmes (jaunām sistēmām tās sauc arī par uzlabotajām mazajām azimuta zīmēm (Improved Azimuth Change pulse jeb IACP), kā arī viena ziemeļu atzīme. Ziemeļu atzīme nāk no plkst. azimuta atzīmes ģenerators pie Šis ir antenas novietojums, kad tā ir vērsta uz ziemeļiem, un mazas azimuta atzīmes kalpo antenas griešanās leņķa mērīšanai.
Uztvērējs- kalpo impulsu saņemšanai ar frekvenci 1090 MHz.
Signālu procesors- kalpo saņemto signālu apstrādei.
Indikators- kalpo, lai norādītu apstrādāto informāciju.
Lidmašīnas transponderis ar antenu- kalpo impulsa radiosignāla, kas satur papildu informāciju, pārraidei atpakaļ uz radaru pēc pieprasījuma radio signāla saņemšanas.
Sekundārā radara darbības princips ir izmantot gaisa kuģa transpondera enerģiju, lai noteiktu gaisa kuģa pozīciju. Radars apstaro apkārtējo telpu ar pratināšanas impulsiem frekvencēs P1 un P3, kā arī slāpēšanas impulsu P2 ar frekvenci 1030 MHz. Gaisa kuģis, kas aprīkots ar retranslatoriem, kas atrodas pratināšanas stara pārklājuma zonā, saņemot nopratināšanas impulsus, ja ir spēkā nosacījums P1,P3>P2, reaģē uz pieprasīto radaru ar kodētu impulsu sēriju 1090 MHz frekvencē. , kas satur papildu informāciju par dēļa numuru, augstumu un tā tālāk. Gaisa kuģa transpondera atbilde ir atkarīga no radara pieprasījuma režīma, un pieprasījuma režīmu nosaka laika intervāls starp pieprasījuma impulsiem P1 un P3, piemēram, pieprasījuma režīmā A (režīms A) laika intervāls starp stacijas pieprasījumu. impulsi P1 un P3 ir 8 mikrosekundes un, saņemot šādu pieprasījumu, retranslators atbildes impulsos iekodē savu gaisa kuģa numuru.
Pieprasījuma režīmā C (režīms C) laika intervāls starp stacijas pieprasījuma impulsiem ir 21 mikrosekunde un, saņemot šādu pieprasījumu, gaisa kuģa transponderis atbildes impulsos kodē tā augstumu. Radars var nosūtīt pieprasījumu arī jauktā režīmā, piemēram, režīmā A, režīmā C, režīmā A, režīmā C. Lidmašīnas azimutu nosaka antenas griešanās leņķis, ko savukārt nosaka, aprēķinot mazas azimuta zīmes.
Diapazonu nosaka saņemtās atbildes aizkave. Ja lidmašīna atrodas sānu daivu, nevis tālās gaismas diapazonā vai atrodas aiz antenas, tad lidmašīnas retranslators, saņemot pieprasījumu no radara, savā ieejā saņems nosacījumu, ka impulsi P1, P3 No transpondera saņemto signālu apstrādā radara uztvērējs, pēc tam nonāk signālu procesorā, kas apstrādā signālus un sniedz informāciju gala lietotājam un (vai) kontrollampiņam. Sekundārā radara priekšrocības: Kosmosā nosūtītie radioviļņi pārvietojas ar gaismas ātrumu. Bet, tiklīdz viņi savā ceļā sastopas ar kādu objektu, piemēram, lidmašīnu vai kuģi, viņi no tā atspīd un atgriežas. Līdz ar to ar to palīdzību iespējams atklāt dažādus tālus objektus, novērot tos un noteikt to koordinātas un parametrus. Tiek saukta objektu atrašanās vietas noteikšana, izmantojot radioviļņus radars. Aleksandrs Stepanovičs Popovs
1897. gadā krievu fiziķa Aleksandra Stepanoviča Popova vadītajās eksperimentālās radiosakaru sesijās starp jūras transportu "Eiropa" un kreiseri "Āfrika" tika atklāta interesanta parādība. Izrādījās, ka pareizu elektromagnētiskā viļņa izplatīšanos izkropļo visi metāla priekšmeti - masti, caurules, zobrati gan uz kuģa, no kura tika sūtīts signāls, gan uz kuģa, kurā tas tika saņemts. Kad starp šiem kuģiem parādījās kreiseris "leitnants Iļjins", radiosakari starp tiem tika pārtraukti. Tā tika atklāta radioviļņu atstarošanas parādība no kuģa korpusa. Bet, ja radioviļņus var atstarot no kuģa, tad ar to palīdzību var atklāt kuģus. Un tajā pašā laikā citi mērķi. Un jau 1904. gadā vācu izgudrotājs Kristians Hīlsmeiers pieteicās pirmajam radaram un 1905. gadā saņēma patentu par radioviļņu atstarošanas efekta izmantošanu kuģu meklēšanai. Un gadu vēlāk, 1906. gadā, viņš ierosināja izmantot šo efektu, lai noteiktu attālumu līdz objektam, kas atspoguļo radioviļņus. Kristians Hīlsmeiers
1934. gadā skotu fiziķis Roberts Aleksandrs Vatsons-Vats saņēma patentu par savu gaisa objektu noteikšanas sistēmas izgudrojumu un nākamajā gadā demonstrēja vienu no pirmajām šādām ierīcēm. Roberts Aleksandrs Vatsons-Vats
Par kaut kā atrašanās vietas noteikšanu sauc atrašanās vieta. Šim nolūkam tehnoloģija izmanto ierīci, ko sauc lokators. Lokators izstaro kāda veida enerģiju, piemēram, skaņu vai optisku signālu, virzienā uz paredzēto objektu un pēc tam saņem no tā atstaroto signālu. Radarsšim nolūkam izmanto radioviļņus. Faktiski radars vai radara stacija (radars) ir sarežģīta sistēma. Dažādu radaru konstrukcijas var atšķirties, taču to darbības princips ir vienāds. Radio raidītājs sūta radio viļņus kosmosā. Sasniedzot mērķi, viņi no tā atspīd kā no spoguļa un atgriežas atpakaļ. Šāda veida radaru sauc par aktīvo. Radara galvenās sastāvdaļas ir raidītājs, antena, antenas slēdzis, uztvērējs un indikators. Pamatojoties uz radioviļņu izstarošanas metodi, radarus iedala impulsa un nepārtrauktā. Kā darbojas impulsa radars? Radioviļņu raidītājs tiek ieslēgts uz īsu brīdi, tāpēc radioviļņi tiek izstaroti impulsos. Viņi nonāk antenā, kas atrodas paraboloīda formas spoguļa fokusā. Tas ir nepieciešams, lai radioviļņi izplatītos noteiktā virzienā. Radara darbība ir līdzīga gaismas prožektora darbībai, kura stari līdzīgi tiek virzīti debesīs un, tās apgaismojot, meklē vēlamo objektu. Taču uzmanības centrālais darbs aprobežojas ar to. Un radars ne tikai raida radioviļņus, bet arī uztver no atrastā objekta atstaroto signālu (radio atbalss). Šo funkciju veic uztvērējs. Impulsa radara antena darbojas vai nu pārraidīšanai, vai uztveršanai. Šim nolūkam ir slēdzis. Tiklīdz tiek nosūtīts radio signāls, raidītājs tiek izslēgts un uztvērējs tiek ieslēgts. Ir pauze, kuras laikā radars it kā “klausās” raidījumu un gaida radio atbalsi. Un, tiklīdz antena uztver atstaroto signālu, uztvērējs nekavējoties izslēdzas un raidītājs ieslēdzas. Un tā tālāk. Turklāt pauzes laiks var būt vairākas reizes garāks par impulsa ilgumu. Tādējādi izstarotie un saņemtie signāli tiek atdalīti laikā. Saņemtais radiosignāls tiek pastiprināts un apstrādāts. Indikators, kas vienkāršākajā gadījumā ir displejs, parāda apstrādātu informāciju, piemēram, objekta izmēru vai attālumu līdz tam, vai pašu mērķi un tā apkārtni. Radioviļņi pārvietojas kosmosā ar gaismas ātrumu. Tāpēc, zinot laiku t
No radio signāla impulsa izstarošanas līdz tā atgriešanai var noteikt attālumu līdz objektam. R=
cˑ
t/2
, Kur Ar
- gaismas ātrums. Nepārtraukta viļņa radars
nepārtraukti izstaro augstas frekvences radioviļņus. Tāpēc antena uztver arī nepārtrauktu atstarotu signālu. Savā darbībā šādi radari izmanto Doplera efektu. Šī efekta būtība ir tāda, ka no objekta, kas virzās uz radaru, atstarotā signāla frekvence ir augstāka par signāla frekvenci, kas atstarojas no objekta, kas attālinās no tā, neskatoties uz to, ka izstarotā signāla frekvence ir nemainīga. Tāpēc šādus radarus izmanto kustīga objekta parametru noteikšanai. Uz Doplera efekta balstīta radara piemērs ir radars, ko ceļu policija izmanto, lai noteiktu braucoša transportlīdzekļa ātrumu. Meklējot objektu, radara antenas virziena stars skenē telpu, aprakstot pilnu apli vai izvēloties konkrētu sektoru. To var virzīt pa spirālveida līniju, spirālē. Skats var būt arī konisks vai lineārs. Tas viss ir atkarīgs no uzdevuma, kas viņam jāveic. Ja nepieciešams pastāvīgi uzraudzīt izvēlēto kustīgo mērķi, radara antena tiek pastāvīgi vērsta uz to un griežas pēc tam, izmantojot īpašas izsekošanas sistēmas. Radara stacijas pirmo reizi tika izmantotas Otrā pasaules kara laikā, lai atklātu militārās lidmašīnas, kuģus un zemūdenes. Tā 1943. gada decembra beigās uz britu kuģiem uzstādītie radari palīdzēja atklāt fašistu līnijkuģi, kas naktī atstāja Altenfioras ostu Norvēģijā, lai pārtvertu militāros kuģus. Uguns uz līnijkuģa bija ļoti precīza, un drīz tas nogrima. Pirmie radari nebija īpaši attīstīti, atšķirībā no mūsdienu, kas droši aizsargā gaisa telpu no gaisa uzbrukumiem un raķešu uzbrukumiem, atpazīstot gandrīz visus militāros mērķus uz sauszemes un jūrā. Radara vadību izmanto raķešu izvietošanai reljefa atpazīšanai. Radari uzrauga starpkontinentālo raķešu lidojumus. Radari ir atraduši savu pielietojumu civilajā dzīvē. Bez tiem nevar iztikt piloti, kas vada kuģus šauros šaurumos, un gaisa satiksmes dispečeri lidostās, kas uzrauga civilo lidmašīnu lidojumus. Tie ir neaizstājami, kuģojot ierobežotas redzamības apstākļos – naktī vai sliktos laikapstākļos. Ar to palīdzību tiek noteikta jūru un okeānu dibena topogrāfija un pētīta to virsmu piesārņojums. Meteorologi tos izmanto, lai noteiktu pērkona negaisa frontes un mērītu vēja ātrumu un mākoņus. Uz zvejas kuģiem radari palīdz atklāt zivju barus. Ļoti bieži tiek izsaukti radari jeb radaru stacijas (radari). radari. Un, lai gan tagad šis vārds ir kļuvis neatkarīgs, patiesībā tas ir saīsinājums, kas cēlies no angļu vārdiem “ radioatklāšanaundiapazons », kas nozīmē "radio uztveršana un attāluma noteikšana" un atspoguļo radara būtību. Radars sastāv no šādiem galvenajiem elementiem: Raidīšanas ierīce; Uztvērējs; Antenas slēdzis un antenas ierīce; termināļa ierīce; Sinhronizators. Radara blokshēma parādīta 5.2. attēlā. 5.2. att. Radara stacijas blokshēma. Pārraides ierīce Radars ir paredzēts, lai radītu skaņas signālu un pārraidītu to uz antenu. Uztvērējs Radars ir paredzēts antenas uztvertā atstarotā signāla iepriekšējai apstrādei. Tas atdala noderīgo signālu no signāla un traucējumu maisījuma, pārvērš radio signālu video signālā un pārraida to uz gala ierīci. Antenas slēdzis paredzēts, lai savienotu raidītāju ar antenu, kad tiek izstarots zondēšanas signāls, un savienotu uztvērēju ar antenu, saņemot atstaroto signālu. Beigu ierīce lai analizētu noderīgo signālu. Gala ierīces veids ir atkarīgs no signāla veida (analogais vai digitālais), radara informācijas saņēmēja (operators, automātiskās pozīcijas noteikšanas ierīce, dators utt.) un radara informācijas veida. Sinhronizators nodrošina noteiktu radara elementu darbības secību. Piemēram, visizplatītākajos radaros ar impulsa darbības režīmu sinhronizators veic šādas funkcijas: Zondēšanas impulsa veidošanās momenta saskaņošana ar indikatora laika bāzes vai skaitļošanas ierīces nulles skaitīšanas sākuma brīdi; Antenas starojuma modeļa novietojuma koordinācija telpā ar indikatora slaucīšanu vai skaitļošanas ierīces nulles rādījumu; Uztvērēja atvēršanas brīža un tā darbības intervāla noteikšana. Šajā gadījumā būtībā ir iespējamas šādas sinhronizācijas metodes: 1. Sinhronizācija no raidītāja uz gala ierīci. Šādos radaros zondēšanas impulsa veidošanās brīdis nosaka indikatora laika slaucīšanas vai skaitļošanas ierīces nulles ieslēgšanas brīdi. Šīs sinhronizācijas metodes priekšrocība ir tāda, ka raidītāja zondēšanas impulsu atkārtošanās ātruma nestabilitāte neietekmē radara mērījumu precizitāti. Tomēr šādiem radariem ir raksturīga termināla ierīces palaišanas nestabilitāte, ko ir grūti pilnībā novērst. 2. Sinhronizācija no gala ierīces uz raidītāju. Šajā gadījumā termināļa un raidierīces darbību kontrolē ļoti stabils ģenerators, kas iekļauts gala ierīcē. Pateicoties tam, tiek sasniegta augsta radara mērījumu precizitāte. Tomēr problēmas rodas, mainot zondēšanas impulsu atkārtošanās ātrumu. 3. Sinhronizācija, izmantojot atsevišķu ļoti stabilu kvarca oscilatoru, kas neietilpst raidītājā vai gala ierīcē. Šī sinhronizācijas metode tiek izmantota lielākajā daļā mūsdienu radaru, kas parasti nodrošina iespēju mainīt zondēšanas impulsu atkārtošanās ātrumu stacijas darbības laikā. Tas nepieciešams, lai nodrošinātu radara trokšņu noturību, darbojoties pasīvo vai aktīvo radara traucējumu apstākļos. Radara blokshēma galvenokārt ir atkarīga no tā mērķa, zondēšanas signāla veida (impulss vai nepārtraukts) un radiosignāla modulētā parametra. Tomēr vispārīgā gadījumā radiosignāla apstrādes procedūrai radarā ir jāatbilst ne tikai skaņas signāla veidam, bet arī traucējumu veidam. Tāpēc radara blokshēmā jāņem vērā aktīvo un pasīvo elektronisko traucējumu avoti. Šis uzdevums apgrūtina jebkura radara darbību, jo traucējumi izraisa no mērķa atstarotā signāla kropļojumus un rada noderīgas radara informācijas zudumu. Tāpēc atstarotā signāla apstrādes procesā viņi cenšas nomākt traucējumus, kas tiek panākts, radara blokshēmā ieviešot elektroniskās traucējumu aizsardzības ierīces.Skatīt arī
Literatūra
Raksti Saites
Piezīmes
Padomju un krievu radaru stacijas
Radiotehniskā karaspēka radars
"RUS-1" "RUS-2" "P-3""P-8 Volga" "P-10 "Volga-A""“P-14” “P-18 “Terek”” “P-20” “P-30” “P-35 “Drenāža”” “P-37” “P-40” “P-70 “Lena-M” » “Rezonanse-N(E)” “Gredzens” “Kaste” "5N59.19Zh6.35D6/36D6""Casta-2E" "Gamma-S1E" "Gamma-DE" "Aizsardzība-14""5N87" "Desna-M" "Pretinieks-GE"
Radio altimetri
"PRV-9" "PRV-10" "PRV-11" "PRV-13" "PRV-16""PRV-17"
Speciālie pretgaisa aizsardzības radari
P-15 P-19 1L117M Desna-M 76N6 96L6E
Tāla darbības rādiusa radaru stacijas
Dņepra Dņestr-M Daryal Krona Donava Don-2N Duga 1 Volga Voroņeža-M/DM Vitim
Aviācijas radari
Gneiss-2 Gneiss-5 RP-5 Emerald-5 Liana Vega-M Bumblebee E-801 Eye N007 Barrier N010 Beetle ( 8-II/27/M(S)(E)/(M)F(E)/A(E)) N011 Bāri ( M/29) N035 Irbis N050
Kuģu radari
Redoubt-K Guys-1 Guys-2 Neptūna pēda-N rifs Don P-500 Fregate Boletus Furke Monument-A Pal-N 3Р41 3Р95 Karogs Podkat
Counter-baterijas un citi radari
Zoodārzs Stārķis Fara Kredo
Piekrastes radari
Kā radās radars?



Kā darbojas radars?

Radaru pielietojums