Zacznijmy od początku – czym jest radar i dlaczego jest potrzebny? Przede wszystkim chciałbym zauważyć, że radar jest specyficzną gałęzią radiotechniki, która pomaga w określaniu różnych cech otaczających obiektów. Działanie radaru ma na celu przesłanie fal radiowych z obiektu do urządzenia.
Radar, stacja radarowa to pewien zespół różnorodnych urządzeń i aparatury umożliwiających obserwację obiektów. Fale radiowe dostarczane przez radar mogą wykryć badany cel i sporządzić jego mapę szczegółowa analiza. Fale radiowe ulegają załamaniu i niejako „malują” obraz obiektu. Stacje radarowe mogą pracować w każdych warunkach pogodowych i doskonale wykrywać wszelkie obiekty na ziemi, w powietrzu czy w wodzie.
Zasada działania radaru
System działań jest prosty. Fale radiowe ze stacji kierowane są na obiekty, a gdy je napotkają, zostają załamane i odbite z powrotem do radaru. Nazywa się to echem radiowym. Aby wykryć to zjawisko, w stacji instaluje się nadajniki i odbiorniki radiowe o dużej czułości. Wcześniej, zaledwie kilka lat temu, stacje radarowe wymagały ogromnych kosztów. Ale nie teraz. Prawidłowe działanie urządzeń i identyfikacja obiektów zajmuje bardzo mało czasu.
Wszystkie działania radaru opierają się nie tylko na odbiciu fal, ale także na ich rozproszeniu.
Gdzie można zastosować radar?
Zakres zastosowań systemów radarowych jest dość szeroki.
- Pierwszą gałęzią będzie wojsko. Służy do identyfikacji celów naziemnych, wodnych i powietrznych. Radary monitorują i badają terytorium.
- Rolnictwo i leśnictwo. Na takich stacjach specjaliści prowadzą badania mające na celu badanie gleby i roślinności, a także wykrywanie różnego rodzaju pożarów.
- Meteorologia. Badanie stanu atmosfery i tworzenie prognoz na podstawie uzyskanych danych.
- Astronomia. Naukowcy wykorzystują stacje radarowe do badania odległych obiektów, pulsarów i galaktyk.
Radar w przemyśle motoryzacyjnym
Od 2017 roku MAI rozwija rozwiązania mające na celu stworzenie małego formatu stacja radarowa dla samochodów autonomicznych. Już niedługo takie niewielkie urządzenia pokładowe będzie można zamontować w każdym samochodzie. W 2018 roku trwają już testy niestandardowych radarów dla bezzałogowych statków powietrznych. Planuje się, że takie urządzenia będą w stanie identyfikować obiekty naziemne w odległości do 60 km, a obiekty morskie - do 100 km.
Warto przypomnieć, że w 2017 roku zaprezentowano także mały pokładowy radar dwuzakresowy. Unikalne urządzenie zostało opracowane do wykrywania różnego rodzaju obiektów i przedmiotów w każdych warunkach.
Urządzenie I – wskaźnik. Zamiar:
Odtwarzanie na ekranie informacje pierwotne o środowisku pochodzącym z urządzeń radarowych.
Wyznaczanie współrzędnych obiektów powierzchniowych i graficzne rozwiązywanie problemów nawigacyjnych.
Synchronizacja i kontrola trybów pracy stacji.
Tworzenie impulsów wyzwalających dla urządzenia nadawczego.
Generowanie impulsów do uruchomienia urządzeń pomocniczych.
Tworzenie impulsów sygnału kursu dla urządzeń pomocniczych.
Zapewnienie autonomicznego zasilania własnych jednostek i urządzeń.
Konstrukcja i zasada działania:
Urządzenie I składa się z następujących ścieżek i węzłów:
Ścieżka synchronizacji czasu.
Ścieżka podstawy czasu.
Ścieżka celownika i znaczników zasięgu.
Ścieżka wyszukiwania kierunku.
Ścieżka wprowadzania informacji.
Ścieżka trybu prawdziwego ruchu.
Cyfrowy wyświetlacz zasięgu i kierunku.
Lampa elektronopromieniowa i systemy odchylające.
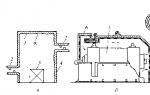
Zasada działania urządzenia I spójrzmy na to schemat strukturalny(ryc. 1).
Ścieżka synchronizacji czasu posiada oscylator główny (3G), który generuje impulsy główne z częstotliwością powtarzania 3000 impulsów/s - dla skali zasięgu 1 i 2 mil; 1500 impulsów/s – dla wag 4 i 8 milowych; 750 impulsów/s – dla wag 16 i 32 mil; 500 imp/s dla skali 64 mil. Na wyjście urządzenia podawane są impulsy główne z sieci 3G w celu wyzwalania urządzeń powiązanych funkcjonalnie (w urządzeniu P-3); uruchomić generator napięcia piłokształtnego (w torze synchronizacji czasu);
Z kolei wtórne impulsy synchronizacyjne odbierane są z Urządzenia P-3 na tor synchronizacji urządzenia, dzięki czemu początek przemiatania w zakresie i kierunku jest synchronizowany z początkiem emisji impulsów sondujących przez Urządzenie A (antenę radaru). i zostaje uruchomiona ścieżka celownika i znaczników zasięgu.
Tor przemiatania czasu, wykorzystując generator skanujący, tworzy i generuje napięcie piłokształtne, które po serii przekształceń podawane jest do układu odchylającego ruchu względnego w lampie katodowej i do toru celownika.
Tor celownika i dalmierzy zaprojektowano tak, aby tworzył ruchomy dalmierz (MRF), dzięki któremu zapewniona jest obserwacja obiektów znajdujących się w zasięgu, a pomiar odległości odbywa się za pomocą elektronicznego licznika cyfrowego. Informacja o zasięgu wyświetlana jest na wyświetlaczu cyfrowym TsT-3.
Wirnik obrotowego transformatora generatora skanującego obraca się synchronicznie i w fazie z anteną, co zapewnia synchroniczny obrót skanera i anteny, a także uzyskanie znaku rozpoczęcia skanowania w momencie maksymalnego obrotu anteny wzór promieniowania przecina płaszczyznę środkową naczynia.
Tor kierunkowskazu składa się z czujnika kąta, generatorów sygnału odczytu i dekodowania oraz obrotowego transformatora służącego do skanowania kierunkowskazu. Kąt obrotu wirującego transformatora generowany na torze celownika, utworzony w postaci zakodowanego sygnału, po zdekodowaniu przesyłany jest do tablicy wyświetlacza cyfrowego TsT-4.
Tor wejściowy informacji przeznaczony jest do wprowadzania informacji o zasięgu i kierunku obiektu na CRT, a także wyświetlania na CRT sygnału wideo pochodzącego z urządzenia P-3.
Tor ruchu rzeczywistego przeznaczony jest do wprowadzania danych o prędkości V s - z logu, przebiegu K s z żyrokompasu, który służy do generowania składowych wektora prędkości w skali w kierunkach N - S i E - W; aby zapewnić ruch znaku własnego statku na ekranie CRT zgodnie z wybraną skalą, ścieżka umożliwia także automatyczny i ręczny powrót znaku własnego do punktu początkowego.
Urządzenie P-3 – transceiver. Zamiar:
Urządzenie P-3 (transceiver) przeznaczone jest do:
Tworzenie i generowanie impulsów sondujących mikrofale;
Odbiór, wzmocnienie i konwersja odbitych sygnałów radarowych na sygnał wideo.
Zapewnienie synchronicznej i jednofazowej pracy w czasie wszystkich bloków i zespołów urządzeń: I; P – 3; A.
Skład urządzenia:
· Jednostka mikrofalowa – 3 (jednostka ultrawysokiej częstotliwości).
· Blok MP (modulator nadajnika).
· Blok FM (filtr modulatora).
· Jednostka AFC (jednostka automatycznej regulacji częstotliwości)
· Blok UR (wzmacniacz regulowany)
· Blok UG (wzmacniacz główny)
· Jednostka NK – 3 (jednostka regulacyjno-sterująca)
· Jednostka ACS (jednostka automatycznej stabilizacji i sterowania)
· Podjednostka FS (tworząca impuls zegarowy)
· 4 urządzenia prostownikowe zasilające bloki i obwody urządzenia P – 3.
Przyjrzyjmy się działaniu urządzenia na jego schemacie blokowym.

Tor generacji sygnału stabilizacyjnego przeznaczony jest do generowania wtórnych impulsów synchronizacyjnych wchodzących do urządzenia, a także do wyzwalania modulatora nadajnika poprzez jednostkę sterującą automatyczną stabilizacją. Za pomocą tych impulsów synchronizujących zapewniona jest synchronizacja impulsów sondujących z początkiem skanowania na CRT urządzenia I.
Tor generowania impulsów sondujących przeznaczony jest do generowania impulsów mikrofalowych i przesyłania ich wzdłuż falowodu do urządzenia A. Następuje to po wygenerowaniu przez modulator napięcia modulacji impulsowej generatora mikrofal oraz impulsów sterujących i synchronizacyjnych współpracujących bloków i węzłów.
Ścieżka generowania sygnału wideo jest przeznaczona do przekształcania odbitych impulsów mikrofalowych na impulsy o częstotliwości pośredniej przy użyciu lokalnego oscylatora i mikserów, tworząc i wzmacniając sygnał wideo, który następnie trafia do urządzenia I. Do przesyłania impulsów sondujących do urządzenia A i impulsów odbitych używany jest wspólny falowód do ścieżki generowania sygnału wideo.
Ścieżka sterowania i konfiguracji zasilania przeznaczona jest do generowania napięć zasilających dla wszystkich bloków i obwodów urządzenia, a także do monitorowania pracy zasilaczy, bloków funkcjonalnych i elementów stacji, magnetronu, lokalnego oscylatora, iskiernika itp.
Urządzenie A jest urządzeniem antenowym. Zamiar:
Urządzenie A jest przeznaczone do emitowania i odbierania impulsów energii mikrofalowej oraz danych wyjściowych dotyczących kąta kursu anteny i znaku kursu do urządzenia I. Jest to antena szczelinowa typu tubowego.
Podstawowe dane urządzenia A.
Szerokość belki:
W płaszczyźnie poziomej – 0,7° ± 0,1
W płaszczyźnie pionowej - 20° ± 0,1
Częstotliwość obrotu anteny 19 ± 4 obr./min.
Zakres temperatur pracy wynosi od - 40°C do + 65°C
Wymiary:
Długość – 833 mm
Szerokość – 3427 mm
Wysokość – 554 mm
Waga – 104 kg.
Strukturalnie urządzenie wykonane jest w postaci 2 odłączanych bloków;
Blok PA – obrotowa część anteny
Blok AR - przeprowadza: wytwarzanie energii mikrofalowej w postaci wiązki radiowej o wymaganym kształcie; ukierunkowane promieniowanie energii w przestrzeń i jej ukierunkowany odbiór po odbiciu od napromieniowanych obiektów.
Działanie urządzenia A.
W bloku PA urządzenia zamontowany jest silnik elektryczny wraz z przekładnią. Silnik elektryczny zasilany jest z sieci okrętowej i zapewnia ruch kołowy bloku AR urządzenia A. Silnik elektryczny poprzez przekładnię obraca także wirnik wirującego transformatora, z którego urządzenia odbieram, poprzez system śledzenia, sygnał o położeniu kątowym anteny względem DP statku (kąt kursu), a także o sygnale kursu statku. Blok PA zawiera również obrotowe złącze mikrofalowe, przeznaczone do połączenia obrotowego emitera (bloku AR) ze stacjonarną ścieżką falowodu.
Jednostka AR będąca anteną szczelinową formuje kierunkową wiązkę radiową o wymaganym kształcie. Wiązka radiowa emituje energię mikrofalową w przestrzeń kosmiczną i zapewnia kierunkowy odbiór części tej energii mikrofalowej odbitej od napromieniowanych obiektów. Odbity sygnał poprzez wspólny falowód trafia do urządzenia P-3, gdzie po serii przekształceń zamienia się w sygnał wideo.
Blok PA zawiera także termoelektryczną nagrzewnicę (TEH), zaprojektowaną tak, aby zapobiec niebezpieczeństwu oblodzenia ruchomych części urządzenia A oraz filtr eliminujący przemysłowe zakłócenia radiowe.
Urządzenie KU jest urządzeniem stycznikowym. Zamiar:
Urządzenie KU (urządzenie stycznikowe) przeznaczone jest do podłączenia radaru do sieci pokładowej, przełączania napięcia wyjściowego zespołu maszynowego, ochrony napędu anteny przed przeciążeniami oraz ochrony radaru w przypadku naruszenia kolejności jego wyłączenia, a także chronić stację w przypadku awaryjnego wyłączenia sieci pokładowej.
Urządzenie dostarcza napięcie prądu przemiennego 220V o częstotliwości 400 Hz do urządzeń radarowych w czasie 3 ÷ 6 sekund po włączeniu zespołu maszyny.
W przypadku awaryjnego wyłączenia sieci pokładowej urządzenie wyłącza odbiorniki w ciągu 0,4 ÷ 0,5 s.
Urządzenie wyłącza napęd anteny po 5 ÷ 20 s. w przypadku nieprawidłowej kolejności faz, w przypadku przerwy w jednej z faz oraz w przypadku wzrostu prądu obciążenia napędu antenowego.
Konwerter WSZYSTKIE – 1,5m. Zamiar:
Przetwornica przeznaczona jest do zamiany prądu trójfazowego o częstotliwości 50 Hz na prąd jednofazowy AC napięcie 220 V, częstotliwość 427 Hz. Jest to zespół maszynowy, na wale którego umieszczony jest trójfazowy silnik synchroniczny i jednofazowy generator synchroniczny.
Przetwornica zapewnia lokalne i zdalne uruchamianie i zatrzymywanie jednostki napędowej.
ZARZĄDZANIE PRACĄ RADARU.
Sterowanie pracą radaru odbywa się z panelu i panelu sterowania urządzenia I.
Sterowanie dzieli się na operacyjne i pomocnicze.
Używając operacyjny sterownica:
Stacja włącza się i wyłącza. (27)
Przełącznik skali zasięgu. (14)
Odległości do celów mierzy się za pomocą dalmierza. (15)
Kąty kursu i namiar celów określa się za pomocą elektronicznych i mechanicznych celowników. (28), (29)
Oznaczanie kursu jest wyłączone. (7)
Kontrolują zdolność odróżniającą (wzmocnienie) sygnałów radarowych i odporność na zakłócenia. (8, 9, 10, 11, 12, 13)
Regulowana jest jasność podświetlenia panelu i skal. (2)
Używając pomocniczy sterownica:
Obrót anteny jest włączany i wyłączany. (26)
Połączenie pomiędzy wskaźnikiem a kłodą i żyrokompasem jest włączone.
Odczyty ruchomej skali wizjera kierunkowego są uzgodnione. (29)
Jasność oznakowań odchylenia i kursu można regulować. (22, 23)
Funkcja AFC jest wyłączona i włączony jest tryb ręczny regulacji częstotliwości lokalnego oscylatora. (27)
Środek obrotu skanera pokrywa się ze środkiem geometrycznym kierunkowskazu. (20)
Lokalny oscylator urządzenia P-3 jest regulowany.
Tryb monitorowania ogólnej wydajności radaru jest włączony. (16, 17, 18, 19)
Zasilanie modulatora urządzenia P-3 jest wyłączone.
Jasność ekranu CRT jest ustawiona, a wiązka jest skupiona.
Obrotnica anteny jest włączona. (26)
W urządzeniu KU włączone jest ogrzewanie anteny
Rozmieszczenie elementów sterujących na pilocie i panelu wskaźników pokazano na rysunku.
 Ryc. nr 3. Panel sterowania wskaźnika radarowego Najada-5:
Ryc. nr 3. Panel sterowania wskaźnika radarowego Najada-5:
1-„Podświetlenie skali”; 2-„Podświetlenie panelu”; 3-„Stopnie”; 4-"Skala - interwał"; 5- „Mile”; 6-„PZ”; 7-„Znak kursu”; 8- „Deszcz”; 9-„Jasność VN”; 10-„Jasność VD”; 11-„Jasność MD”; 12- „Fale”; 13-„Wzmocnienie”; 14-„Przełącznik skali zakresu”; 15- „Zasięg”; 16- „Bloki”; 17-„Prostowniki”; 18- „Kontrola”; 19-„Wskaźnik wskaźnika”; 20-„Ustawianie środka”; 21-„RFC-wyłączone”; 22-„Jasność OK”; 23-„Jasność skanowania”; 24-„Fałszywe sygnały”; 25- „Kontrola radarowa”; 26-„Antena – wyłączona”; 27 – „Radar wyłączony”; 28-„Wizjer mechaniczny”; 29-„Kierunek”; 30-"ID-kursu-północ-północ"; 31-„Resetuj do środka”; 32-„Resetuj”; 33-„Przesunięcie środkowe”; 34-„Rozliczanie rozbiórki”; 35-„Prędkość ręczna”
KONSERWACJA RADARU.
Przed włączeniem radaru należy:
Wytwarzać inspekcja zewnętrzna i upewnij się, że nie ma zewnętrznych uszkodzeń urządzeń i jednostki.
Ustaw elementy sterujące w pozycjach pokazanych w tabeli.
| Nazwa organu zarządzającego | Położenie elementów sterujących przed włączeniem kierunkowskazu |
| Przełącznik dwupozycyjny „Radar – wyłączony” | Pokrętło „Rain” Pokrętło „VN Brightness” Pokrętło „VD Brightness” Pokrętło „MD Brightness” Pokrętło „Wave” Pokrętło „Wzmocnienie” Pokrętło „Scales oświetlenie” Pokrętło „Sweep Jasność, OK” Przełącznik „Kurs – Północ – Północ ID” Przycisk „ Resetuj do środka” Regulatory „Przesunięcie środkowe” Regulatory „Uwzględnianie dryftu: prędkość, kierunek” Regulator „Prędkość ręcznie” Przycisk „Fałszywe sygnały” Przełącznik dwupozycyjny „Żyrokompas - Wył.” |
Przełącznik dwupozycyjny „Antena – Wył.”
"Wyłączony" Skrajny lewy Środkowy Średni Średni Skrajny lewy środkowy Średni Stały fabrycznie „Kurs” Włączony Średnia 0 w skali cyfrowej 0 w skali cyfrowej Włączony „Wyłączony”
"Wyłączony"
Pozostałe elementy sterujące mogą pozostać w dowolnej pozycji.
Włączenie stacji.
Pokładowy przełącznik napięcia jest ustawiony w pozycji „Włączony” (zasilacz uruchamia się)
Na wskaźniku:
Wyłączyć „Radar - wyłączony” ustawiony na pozycję radarową
Przełącznik dwustabilny „Antena - wyłączona” ustawić w pozycji Antena.
Włącz przycisk operacyjny P - 3 (powinny zapalić się mechanizm skali i napisy objaśniające).
Po 1,5 ÷ 2,5 minuty. Ekran CRT powinien wyświetlać obrotowy skan, znak kursu, znaczniki zasięgu i linię kursu.
Po 4 minutach powinien pojawić się ślad impulsu sondującego oraz ślady obiektów w polu widzenia radaru.
Za pomocą odpowiednich elementów sterujących wybierz optymalną jasność HV; VD; lekarz; i położenie „Fali”.
Transceiver włącza się za pomocą przełącznika przyciskowego. (6)
Orientacja obrazu względem południka prawdziwego (północ) lub względem płaszczyzny środkowej statku (kursu) w trybie ruchu względnego odbywa się za pomocą przełącznika 30 poprzez ustawienie go w pozycji „północ” lub „kurs”. Za pomocą tego samego przełącznika, ustawiając go w pozycji „północ - ID”, zapewniony jest tryb ruchu rzeczywistego w skali skali 1; 2; 4; 8 mil.
Środek przemiatania przesuwany jest w wybrane miejsce za pomocą potencjometrów (33)
Początek (środek) skanowania powraca do środka CRT za pomocą przycisków 31 i 32.
Własne dane dotyczące prędkości statku można wprowadzić ręcznie (35)
Korektę dryftu prądu wprowadza się potencjometrem (35)
Cyfrowe wskazanie odległości zmierzonej do celu oraz wskazanie kierunku odbywa się na wyświetlaczach cyfrowych TsT - 3 i TsT - 4 (3; 5)
Monitorowanie działania radaru odbywa się za pomocą wbudowanego systemu, który zapewnia monitorowanie ogólnej wydajności i rozwiązywanie problemów (16; 17; 18; 19;)
Są przekonani o możliwości: sterowania celownikami zasięgu szybkiego i kierunku wysokiego napięcia, a także wyłączania znaku kursu i zmiany skali poprzez przełączenie skali zasięgu.
Sprawdź: zrównanie początku ruchu ze środkiem ekranu (w dwóch wzajemnie prostopadłych pozycjach kierunkowskazu na skali 4 mil). Funkcjonalność schematu orientacji obrazu (żyrokompas jest wyłączony, przełącznik „kurs - północ - północ ID” jest ustawiony naprzemiennie w pozycjach „kurs” i „północ”, upewniając się, że znak kursu zmienia swoje położenie). Następnie ustaw przełącznik dwustabilny w pozycji „żyrokompas” i upewnij się, że położenie linii kursu odpowiada wskazaniom repetytora baterii głównej.
Sprawdź przesunięcie środka obrotu skanu w trybie OD (uchwyt „reset to center” ustawiony jest w pozycji wyłączonej, uchwyt „centre shift” płynnie przesuwa środek skanu w lewo i prawo o 2 /3 promienia CRT, wszystko to odbywa się w skali zasięgu 1; 4; 8 mil przy orientacji naprzemiennej wzdłuż „kursu” i „północy”).
Za pomocą przycisku „resetuj do środka” ponownie wyrównuję środek skanu ze środkiem „ekranu CRT”.
W tym celu sprawdzają działanie wskaźnika w trybie ID: ustawiają przełącznik w tryb „północ - ID”, skalę zasięgu ustawiają na 1 milę, wyłączają log i żyrokompas, pokrętło „rozliczenia dryfu” w pozycji pozycji zerowej, ustaw ręcznie dowolną wartość prędkości za pomocą przycisku „reset” do środka” upewnij się, że początek przemiatania na ekranie porusza się po trasie z ustawioną prędkością. Gdy ruch osiągnie 2/3 promienia CRT, środek skanowania powinien automatycznie powrócić na środek ekranu. Powrót początku przemiatania do punktu początkowego należy również zapewnić poprzez ręczne naciśnięcie przycisku „reset”.
Użyj pokręteł „rozliczeń dryftu”, aby wprowadzić dowolną wartość korekcji kursu i prędkości i upewnij się, że zmienia to parametry przesuwania początku skanowania na ekranie CRT.
Przełącznik „kurs – północ – północ ID” jest ustawiony w pozycji „kurs” lub „północ”. W takim wypadku początek przemiatania powinien przesunąć się na środek ekranu i włączyć tryb OD. To samo powinno się dziać przy ustawianiu skali zakresu na 16; 32; 64 mile.
Sprawdź ręczne przesunięcie początku skanowania w trybie ID: wyłącz przycisk „reset do środka”, ustaw regulatory „przesunięcia środkowego” w pozycji zapewniającej przesunięcie początku skanowania o kwotę mniejszą niż 2/3 promienia CRT, naciśnij przycisk „reset” i upewnij się, że środkowe przesunięcie przesunęło się do wybranego punktu i zaczęło się przesuwać dany kierunek. Po przesunięciu o 2/3 promienia ekranu, środek skanowania automatycznie powraca do wybranego punktu.
Praca stacji jest monitorowana przez wbudowany system umożliwiający monitorowanie i rozwiązywanie problemów. System składa się z elementów wchodzących w skład odrębnych jednostek w urządzeniach i bloku stacji.
Pracę urządzenia P-3 monitoruje się za pomocą znajdującego się w nim modułu NK-3, który sprawdza sprawność zasilaczy oraz bloków i zespołów funkcjonalnych.
Monitorowanie pracy urządzenia I i wyszukiwanie uszkodzonego zasilacza lub jednostki funkcjonalnej odbywa się za pomocą wbudowanej jednostki sterującej znajdującej się na panelu sterowania urządzenia I.
STACJA JEST WYŁĄCZONA:
· Odłączenie zasilania za pomocą przełącznika „Radar – wyłączony”.
· Odłączenie napięcia z sieci pokładowej (przycisk „stop” rozrusznika)
· Odłączenie napięcia od elementów komunikacyjnych z logiem i żyrokompasem.
Stacja radarowa
Zapytanie o „radar” zostało przekierowane tutaj; o rejestrze leki patrz Rejestr leków.
Stacja radarowa(radar) lub radar(Angielski) radar z RA dio D etekcja A II R wędkarstwo- detekcja i wyznaczanie odległości drogą radiową) - system służący do wykrywania obiektów powietrznych, morskich i naziemnych oraz określania ich zasięgu, prędkości i parametrów geometrycznych. Stosuje metodę opartą na emisji fal radiowych i rejestracji ich odbić od obiektów. Angielski termin-akronim pojawił się w 1941 r., później w jego pisaniu wielkie litery zastąpiono małymi.
Historia
W ZSRR i Rosji
W Związku Radzieckim świadomość konieczności wykrywania statków powietrznych pozbawionych wad dźwiękowych i optycznych środków dozoru doprowadziła do rozwoju badań w dziedzinie radarów. Pomysł zaproponowany przez młodego artylerzystę Pawła Oszczepkowa zyskał aprobatę naczelnego dowództwa: Ludowego Komisarza Obrony ZSRR K. E. Woroszyłowa i jego zastępcy M. N. Tuchaczewskiego.
W 1946 roku amerykańscy specjaliści – Raymond i Hacherton, były pracownik Ambasada USA w Moskwie napisała: „Radzieccy naukowcy z sukcesem opracowali teorię radaru na kilka lat przed wynalezieniem radaru w Anglii”.
Klasyfikacja
W zależności od zakresu zastosowania rozróżniają- wojskowy;
- cywilny;
- radar wykrywający;
- Radar kontrolny i śledzący;
- Radary panoramiczne;
- Radar boczny;
- Radary meteorologiczne;
- Radar do wyznaczania celów;
- Radar nadzoru sytuacji;
- Radary przybrzeżne
- Radary morskie
- Radary pokładowe
- Mobilne radary
- Pierwotne lub pasywne
- Drugorzędny lub aktywny
- Łączny
- Radar pozahoryzontalny
- Metr
- decymetr
- Centymetr
- Milimetr
Budowa i zasada działania radaru głównego
Radar pierwotny (pasywny) służy głównie do wykrywania celów poprzez oświetlanie ich falą elektromagnetyczną, a następnie odbieranie odbić (echa) tej fali od celu. Ponieważ prędkość fale elektromagnetyczne stała (prędkość światła), możliwe staje się określenie odległości do celu na podstawie pomiaru różnych parametrów propagacji sygnału.
Stacja radarowa składa się z trzech elementów: nadajnika, anteny i odbiornika.
Nadajnik(urządzenie nadawcze) jest źródłem sygnału elektromagnetycznego o dużej mocy. Może to być potężny generator impulsów. W przypadku radarów impulsowych o zasięgu centymetrowym jest to zwykle magnetron lub generator impulsów działający według następującego schematu: oscylator główny to mocny wzmacniacz, najczęściej wykorzystujący jako generator lampę o fali bieżącej, a w przypadku radarów o zasięgu metrowym lampa triodowa często używane. W zależności od konstrukcji nadajnik działa albo w trybie impulsowym, generując powtarzające się krótkie, silne impulsy elektromagnetyczne, albo emituje ciągły sygnał elektromagnetyczny.
Antena dokonuje skupienia sygnału nadajnika i tworzenia wzoru promieniowania, a także odbiera sygnał odbity od celu i przekazuje ten sygnał do odbiornika. W zależności od wykonania odbity sygnał może zostać odebrany albo przez tę samą antenę, albo przez inną, która czasami może znajdować się w znacznej odległości od urządzenia nadawczego. Jeżeli nadawanie i odbiór są połączone w jednej antenie, te dwie czynności wykonywane są naprzemiennie i aby silny sygnał wyciekający z nadajnika nadawczego do odbiornika nie oślepił odbiornika słabym echem, przed anteną umieszcza się specjalne urządzenie. odbiornika, zamykając wejście odbiornika w momencie emisji sygnału sondującego.
Odbiornik (urządzenie odbiorcze) wykonuje wzmocnienie i przetwarzanie odbieranego sygnału. W samym prosty przypadek powstały sygnał podawany jest do tuby (ekranu), na której wyświetlany jest obraz zsynchronizowany z ruchem anteny.
Różne radary opierają się na różnych metodach pomiaru odbitego sygnału:
Metoda częstotliwościowa
Metoda pomiaru zakresu częstotliwości opiera się na wykorzystaniu modulacji częstotliwości emitowanych sygnałów ciągłych. W tej metodzie częstotliwość jest emitowana przez okres, który zmienia się liniowo od f1 do f2. Odbity sygnał dotrze modulowany liniowo w chwili poprzedzającej chwilę obecną o czas opóźnienia. To. częstotliwość odbitego sygnału odbieranego przez radar będzie zależeć proporcjonalnie od czasu. Czas opóźnienia jest określony przez gwałtowną zmianę częstotliwości sygnału różnicowego.
Zalety:
- pozwala mierzyć bardzo krótkie zasięgi;
- zastosowano nadajnik małej mocy;
Wady:
- wymagane są dwie anteny;
- pogorszenie czułości odbiornika w wyniku wycieku przez antenę do ścieżki odbiorczej promieniowania nadajnika, z zastrzeżeniem przypadkowych zmian;
- wysokie wymagania dotyczące liniowości zmian częstotliwości;
To są jego główne wady.
Metoda fazowa
Metoda radaru fazowego (koherentnego) polega na izolowaniu i analizie różnicy faz pomiędzy sygnałami wysłanymi i odbitymi, która powstaje na skutek efektu Dopplera, gdy sygnał odbija się od poruszającego się obiektu. W takim przypadku urządzenie nadawcze może pracować zarówno w trybie ciągłym, jak i impulsowym. Główną zaletą tej metody jest to, że „pozwala ona na obserwację jedynie poruszających się obiektów, a to eliminuje zakłócenia ze strony obiektów nieruchomych znajdujących się pomiędzy sprzętem odbiorczym a celem lub za nim”.
Ponieważ stosowane są fale ultrakrótkie, jednoznaczny zakres pomiaru zasięgu jest rzędu kilku metrów. Dlatego w praktyce stosuje się bardziej złożone obwody, w których występują dwie lub więcej częstotliwości.
Zalety:
- promieniowanie o małej mocy, ponieważ generowane są nietłumione oscylacje;
- dokładność nie zależy od przesunięcia częstotliwości Dopplera odbicia;
- dość proste urządzenie;
Wady:
- brak rozdzielczości zakresu;
- pogorszenie czułości odbiornika w wyniku przenikania promieniowania nadajnika przez antenę do ścieżki odbiorczej, z zastrzeżeniem przypadkowych zmian;
Metoda impulsowa
Nowoczesne radary śledzące budowane są jako radary impulsowe. Radar impulsowy przesyła sygnał nadawczy tylko przez bardzo krótki czas, w postaci krótkiego impulsu (zwykle około mikrosekundy), po czym przechodzi w tryb odbioru i nasłuchuje echa odbitego od celu, podczas gdy wypromieniowany impuls rozchodzi się w przestrzeni.
Ponieważ impuls przemieszcza się daleko od radaru ze stałą prędkością, czas upływający od momentu wysłania impulsu do otrzymania odpowiedzi echa jest bezpośrednią zależnością od odległości do celu. Kolejny impuls można wysłać dopiero po pewnym czasie, czyli po powrocie impulsu (jest to zależne od zasięgu detekcji radaru, mocy nadajnika, zysku anteny, czułości odbiornika). Jeżeli impuls zostanie wysłany wcześniej, echo poprzedniego impulsu od odległego celu może zostać pomylone z echem drugiego impulsu od bliskiego celu.
Nazywa się odstęp czasu między impulsami odstęp powtarzania impulsów, jego odwrotność jest ważnym parametrem zwanym częstotliwość powtarzania impulsów(CPI). Radary dalekiego zasięgu o niskiej częstotliwości mają zazwyczaj odstęp powtarzania wynoszący kilkaset impulsów na sekundę. Częstotliwość powtarzania impulsów jest jedną z charakterystycznych cech, dzięki której możliwe jest zdalne określenie modelu radaru.
Zalety metody pomiaru zakresu impulsów:
- możliwość zbudowania radaru z jedną anteną;
- prostota urządzenia wskaźnikowego;
- Wygoda pomiaru zasięgu kilku celów;
- prostota emitowanych impulsów, trwających bardzo krótko i odbieranych sygnałów;
Wady:
- Konieczność stosowania dużych mocy impulsów nadajnika;
- niemożność pomiaru krótkich dystansów;
- duża martwa strefa;
Usuwanie zakłóceń pasywnych
Jednym z głównych problemów radarów impulsowych jest pozbycie się sygnału odbitego od obiektów nieruchomych: powierzchnia ziemi, wysokie wzgórza itp. Jeśli na przykład samolot znajduje się pod wysokim wzgórzem, sygnał odbity od tego wzgórza całkowicie zablokuje sygnał z samolotu. W przypadku radarów naziemnych problem ten objawia się podczas pracy z obiektami nisko latającymi. W przypadku pokładowych radarów impulsowych wyraża się to tym, że odbicie od powierzchni ziemi zasłania radarem wszystkie obiekty znajdujące się pod samolotem.
Metody eliminacji zakłóceń wykorzystują w ten czy inny sposób efekt Dopplera (częstotliwość fali odbitej od zbliżającego się obiektu wzrasta, a od odlatującego obiektu maleje).
Najprostszym radarem, który może wykryć obiekt zakłócający, jest radar z ruchomym wyborem celu(PDS) – radar impulsowy, który porównuje odbicia z więcej niż dwóch lub więcej interwałów powtarzania impulsów. Każdy cel poruszający się względem radaru powoduje zmianę parametru sygnału (etap w szeregowym SDC), podczas gdy zakłócenia pozostają niezmienione. Eliminacja zakłóceń następuje poprzez odjęcie odbić od dwóch kolejnych przedziałów. W praktyce eliminację szumów można przeprowadzić za pomocą specjalnych urządzeń - kompensatorów przelotowych lub algorytmów w oprogramowaniu.
Systemy operacyjne CRT mają zasadniczą słabość: są ślepe na cele o określonych prędkościach kołowych (które powodują zmiany fazowe o dokładnie 360 stopni) i takie cele nie są obrazowane. Szybkość, z jaką cel znika z radaru, zależy od częstotliwości pracy stacji i częstotliwości powtarzania impulsów. Nowoczesne PRF emitują wiele impulsów z różną częstotliwością powtarzania - tak, że niewidoczne prędkości przy każdej częstotliwości powtarzania impulsów są wychwytywane przez inne PRF.
Zaimplementowano inny sposób na pozbycie się zakłóceń radary impulsowo-dopplerowskie, które wykorzystują znacznie bardziej złożone przetwarzanie niż radary z SDC.
Ważną właściwością radarów impulsowo-dopplerowskich jest spójność sygnału. Oznacza to, że wysyłane sygnały i odbicia muszą mieć pewną zależność fazową.
Pulsacyjne radary dopplerowskie są ogólnie uważane za lepsze od radarów MDT w wykrywaniu nisko latających celów w wielu obiektach naziemnych i są preferowaną techniką stosowaną w nowoczesnych samolotach myśliwskich do przechwytywania/sterowania ogniem w powietrzu (przykładami są AN/APG-63, 65, 66, 67 i 70 radarów). W nowoczesnym radarze dopplerowskim większość przetwarzania jest wykonywana przez oddzielny procesor forma cyfrowa przy użyciu cyfrowych procesorów sygnałowych, zwykle wykorzystujących wysokowydajny algorytm szybkiej transformacji Fouriera do przekształcania danych cyfrowych dotyczących wzorców odbić w coś, czym łatwiej zarządzać innymi algorytmami. Cyfrowe procesory sygnałowe są bardzo elastyczne, gdyż zastosowane w nich algorytmy można szybko zastąpić innymi, zmieniając jedynie program w pamięci urządzenia („firmware” ROM), tym samym w razie potrzeby szybko dostosowując się do techniki zakłócania przeciwnika.
Zasięgi radarowe
| Zakres | Etymologia | Częstotliwości | Długość fali | Notatki |
|---|---|---|---|---|
| HF | angielski wysoka częstotliwość | 3-30 MHz | 10-100 m | Radary Straży Przybrzeżnej, radary „poza horyzontem”. |
| P | angielski poprzedni | < 300 МГц | > 1 m | Używany we wczesnych radarach |
| UKF | angielski bardzo wysoka częstotliwość | 50-330 MHz | 0,9-6 m | Wykrywanie dalekiego zasięgu, eksploracja Ziemi |
| UKF | angielski bardzo wysoka częstotliwość | 300-1000 MHz | 0,3-1 m | Wykrywanie na duże odległości (np. ostrzał artyleryjski), eksploracja lasów, powierzchnia Ziemi |
| L | angielski Długi | 1-2 GHz | 15-30cm | nadzór i kontrola ruchu lotniczego |
| S | angielski Krótki | 2-4 GHz | 7,5-15 cm | kontrola ruchu lotniczego, meteorologia, radar morski |
| C | angielski Kompromis | 4-8 GHz | 3,75-7,5 cm | meteorologia, transmisja satelitarna, zasięg pośredni pomiędzy X i S |
| X | 8-12 GHz | 2,5-3,75cm | kontrola broni, naprowadzanie rakiet, radar morski, pogoda, mapowanie w średniej rozdzielczości; w USA w radarach lotniskowych wykorzystywane jest pasmo 10,525 GHz ± 25 MHz | |
| Ku | angielski pod K | 12-18 GHz | 1,67-2,5 cm | mapowanie wysoka rozdzielczość, wysokościomierz satelitarny |
| K | niemiecki kurz- "krótki" | 18–27 GHz | 1,11-1,67 cm | zastosowanie jest ograniczone ze względu na silną absorpcję przez parę wodną, dlatego stosuje się zakresy K u i K a. Pasmo K jest wykorzystywane do wykrywania chmur w policyjnych radarach drogowych (24,150 ± 0,100 GHz). |
| Ka | angielski powyżej K | 27-40 GHz | 0,75-1,11 cm | Mapowanie, kontrola ruchu lotniczego krótkiego zasięgu, specjalne radary sterujące kamerami drogowymi (34.300 ± 0.100 GHz) |
| mm | 40-300 GHz | 1-7,5 mm | fale milimetrowe, podzielone na dwa następujące zakresy | |
| V | 40-75 GHz | 4,0-7,5 mm | Wyroby medyczne EHF stosowane w fizjoterapii | |
| W | 75-110 GHz | 2,7-4,0 mm | czujniki w eksperymentalnych pojazdach zautomatyzowanych, precyzyjne badania pogodowe |
Radar wtórny
„Radar wtórny” jest używany w lotnictwie do identyfikacji statków powietrznych. Główną cechą jest zastosowanie aktywnego transpondera w samolocie.
Zasada działania radaru wtórnego różni się nieco od zasady działania radaru pierwotnego. Wtórna Stacja Radarowa składa się z następujących elementów: nadajnika, anteny, generatorów znaczników azymutu, odbiornika, procesora sygnałowego, wskaźnika oraz transpondera pokładowego wraz z anteną.
Nadajnik- służy do wysyłania impulsów żądań do anteny o częstotliwości 1030 MHz
Antena- służy do emisji i odbioru odbitego sygnału. Zgodnie ze standardami ICAO dotyczącymi radaru wtórnego antena emituje o częstotliwości 1030 MHz i odbiera o częstotliwości 1090 MHz.
Generatory znaczników azymutu- służyć do generowania znaki azymutu (Impuls zmiany azymutu lub ACP) i wytwarzanie Znaki północy (Impuls referencyjny azymutu lub ARP). W jednej rewolucji anteny radarowe Generowanych jest 4096 małych znaczników azymutu (dla starych systemów) lub 16384 małych znaczników azymutu (w przypadku nowych systemów nazywane są one również ulepszonymi małymi znacznikami azymutu (Improved Azimuth Change impuls lub IACP), a także jeden znak północy. Znak północy pochodzi z generator znaków azymutu na Jest to położenie anteny, gdy jest ona skierowana na północ, a małe znaki azymutu służą do pomiaru kąta obrotu anteny.
Odbiornik- służy do odbioru impulsów o częstotliwości 1090 MHz.
Procesor sygnałowy- służy do przetwarzania odbieranych sygnałów.
Wskaźnik- służy do wskazania przetwarzanych informacji.
Transponder samolotu z anteną- służy do przesyłania impulsowego sygnału radiowego zawierającego dodatkowe informacje z powrotem do radaru po otrzymaniu żądania sygnału radiowego.
Zasada działania radaru wtórnego polega na wykorzystaniu energii transpondera statku powietrznego do określenia pozycji statku powietrznego. Radar naświetla otaczającą przestrzeń impulsami pytającymi o częstotliwościach P1 i P3 oraz impulsem tłumiącym P2 o częstotliwości 1030 MHz. Samoloty wyposażone w transpondery znajdujące się w zasięgu wiązki pytającej, po odebraniu impulsów pytających, jeżeli zachodzi warunek P1,P3>P2, odpowiadają wysyłającemu radarowi serię zakodowanych impulsów o częstotliwości 1090 MHz , które zawierają dodatkowe informacje o numerze tablicy, wysokości i tak dalej. Odpowiedź transpondera statku powietrznego zależy od trybu żądania radarowego, a tryb żądania jest określony przez odstęp czasu między impulsami żądania P1 i P3, na przykład w trybie żądania A (tryb A) odstęp czasu między żądaniem stacji impulsów P1 i P3 wynosi 8 mikrosekund i po otrzymaniu takiego żądania transponder statku powietrznego koduje swój numer statku powietrznego w impulsach odpowiedzi.
W trybie żądania C (tryb C) odstęp czasu pomiędzy impulsami żądania stacji wynosi 21 mikrosekund i po otrzymaniu takiego żądania transponder statku powietrznego koduje swoją wysokość w impulsach odpowiedzi. Radar może również wysyłać żądanie w trybie mieszanym, np. Tryb A, Tryb C, Tryb A, Tryb C. Azymut samolotu wyznaczany jest na podstawie kąta obrotu anteny, który z kolei wyznaczany jest poprzez obliczenie małe znaki azymutu.
Zasięg zależy od opóźnienia otrzymanej odpowiedzi. Jeżeli statek powietrzny znajduje się w zasięgu listków bocznych, a nie głównej wiązki lub znajduje się za anteną, to transponder samolotu po otrzymaniu żądania z radaru otrzyma na swoim wejściu stan pulsujący P1, P3 Sygnał odebrany z transpondera jest przetwarzany przez odbiornik radarowy, następnie trafia do procesora sygnału, który przetwarza sygnały i przekazuje informację użytkownikowi końcowemu i (lub) wskaźnikowi sterującemu. Zalety radaru wtórnego: Fale radiowe wysyłane w przestrzeń kosmiczną podróżują z prędkością światła. Ale gdy tylko napotkają na swojej drodze obiekt, na przykład samolot lub statek, odbijają się od niego i wracają. Dzięki temu za ich pomocą możliwe jest wykrywanie różnych odległych obiektów, obserwowanie ich oraz określanie ich współrzędnych i parametrów. Nazywa się wykrywanie lokalizacji obiektów za pomocą fal radiowych radar. Aleksander Stepanowicz Popow
W 1897 roku podczas eksperymentalnych sesji łączności radiowej pomiędzy transportem morskim „Europa” a krążownikiem „Afryka”, prowadzonych przez rosyjskiego fizyka Aleksandra Stepanowicza Popowa, odkryto ciekawe zjawisko. Okazało się, że prawidłową propagację fali elektromagnetycznej zakłócają wszystkie metalowe przedmioty – maszty, rury, sprzęt, zarówno na statku, z którego sygnał został wysłany, jak i na statku, na którym został on odebrany. Kiedy między tymi statkami pojawił się krążownik „Porucznik Iljin”, komunikacja radiowa między nimi została zerwana. W ten sposób odkryto zjawisko odbicia fal radiowych od kadłuba statku. Ale jeśli fale radiowe mogą zostać odbite od statku, wówczas statki można wykryć za ich pomocą. A jednocześnie inne cele. Już w 1904 roku niemiecki wynalazca Christian Hülsmeier złożył wniosek o pierwszy radar, a w 1905 roku otrzymał patent na wykorzystanie efektu odbicia fal radiowych do wyszukiwania statków. A rok później, w 1906, zaproponował wykorzystanie tego efektu do określenia odległości do obiektu odbijającego fale radiowe. Christiana Hülsmeiera
W 1934 roku szkocki fizyk Robert Alexander Watson-Watt otrzymał patent na swój wynalazek systemu wykrywania obiektów unoszących się w powietrzu, a rok później zademonstrował jedno z pierwszych tego typu urządzeń. Roberta Aleksandra Watsona-Wata
Określanie lokalizacji czegoś nazywa się lokalizacja. W tym celu technologia wykorzystuje urządzenie tzw lokalizator. Lokalizator emituje pewien rodzaj energii, na przykład dźwięk lub sygnał optyczny, w kierunku zamierzonego obiektu, a następnie odbiera sygnał odbity od niego. Radar wykorzystuje w tym celu fale radiowe. W rzeczywistości radar, czyli stacja radarowa (radar), to złożony system. Konstrukcje różnych radarów mogą się różnić, ale zasada ich działania jest taka sama. Nadajnik radiowy wysyła fale radiowe w przestrzeń kosmiczną. Po osiągnięciu celu odbijają się od niego jak od lustra i wracają. Ten typ radaru nazywany jest aktywnym. Głównymi elementami radaru są nadajnik, antena, przełącznik antenowy, odbiornik i wskaźnik. Ze względu na sposób emitowania fal radiowych radary dzielimy na impulsowe i ciągłe. Jak działa radar impulsowy? Nadajnik fal radiowych zostaje włączony na krótki czas, zatem fale radiowe emitowane są impulsowo. Wchodzą do anteny, która znajduje się w ognisku zwierciadła w kształcie paraboloidy. Jest to konieczne, aby fale radiowe rozchodziły się w określonym kierunku. Działanie radaru przypomina działanie reflektora świetlnego, którego promienie w podobny sposób kierują się w niebo i oświetlając je, szukają pożądanego obiektu. Ale praca reflektora ogranicza się do tego. Radar nie tylko wysyła fale radiowe, ale także odbiera sygnał odbity od znalezionego obiektu (echo radiowe). Tę funkcję pełni odbiornik. Antena radaru impulsowego służy do transmisji lub odbioru. Do tego celu służy przełącznik. Po wysłaniu sygnału radiowego nadajnik zostaje wyłączony, a odbiornik włączony. Następuje pauza, podczas której radar zdaje się „nasłuchiwać” audycji i czekać na echo radiowe. A gdy tylko antena złapie odbity sygnał, odbiornik natychmiast się wyłącza, a nadajnik włącza się. I tak dalej. Ponadto czas przerwy może być wielokrotnie dłuższy niż czas trwania impulsu. W ten sposób sygnały emitowane i odbierane są rozdzielane w czasie. Odebrany sygnał radiowy jest wzmacniany i przetwarzany. Wskaźnik, który w najprostszym przypadku jest wyświetlaczem, wyświetla przetworzone informacje, np. wielkość obiektu lub odległość do niego, czy sam cel i jego otoczenie. Fale radiowe przemieszczają się w przestrzeni z prędkością światła. Dlatego znając czas T
Od emisji impulsu sygnału radiowego do jego powrotu można określić odległość do obiektu. R=
C
t/2
, Gdzie Z
– prędkość światła. Radar fali ciągłej
emituje w sposób ciągły fale radiowe o wysokiej częstotliwości. Dlatego antena odbiera również ciągły sygnał odbity. Radary tego typu wykorzystują w swoim działaniu efekt Dopplera. Istota tego efektu polega na tym, że częstotliwość sygnału odbitego od obiektu zbliżającego się do radaru jest większa od częstotliwości sygnału odbitego od obiektu oddalającego się od niego, mimo że częstotliwość emitowanego sygnału jest stała. Dlatego takie radary służą do określenia parametrów poruszającego się obiektu. Przykładem radaru wykorzystującego efekt Dopplera jest radar używany przez policję drogową do określania prędkości poruszającego się pojazdu. W poszukiwaniu obiektu wiązka kierunkowa anteny radaru skanuje przestrzeń, opisując pełny okrąg lub wybierając określony sektor. Można go kierować wzdłuż linii śrubowej, spiralnie. Widok może być również stożkowy lub liniowy. Wszystko zależy od zadania, jakie ma wykonać. Jeżeli konieczne jest ciągłe monitorowanie wybranego poruszającego się celu, antena radaru jest stale na niego skierowana i obraca się za nim za pomocą specjalnych systemów śledzenia. Stacje radarowe zostały po raz pierwszy użyte podczas II wojny światowej do wykrywania samolotów wojskowych, statków i łodzi podwodnych. I tak pod koniec grudnia 1943 roku radary zainstalowane na brytyjskich statkach pomogły wykryć faszystowski pancernik, który nocą opuścił port Altenfiord w Norwegii, aby przechwycić statki wojskowe. Ogień na pancerniku był bardzo celny i wkrótce zatonął. Pierwsze radary nie były zbyt zaawansowane, w przeciwieństwie do nowoczesnych, które niezawodnie chronią przestrzeń powietrzną przed nalotami i atakami rakietowymi, rozpoznając niemal wszystkie cele wojskowe na lądzie i morzu. Naprowadzanie radarowe jest wykorzystywane w rakietach naprowadzających do rozpoznawania terenu. Radary monitorują loty rakiet międzykontynentalnych. Radary znalazły zastosowanie w życiu cywilnym. Bez nich nie mogą się obejść piloci kierujący statkami przez wąskie cieśniny oraz kontrolerzy ruchu lotniczego na lotniskach nadzorujący loty cywilnych statków powietrznych. Są niezastąpione podczas żeglowania w warunkach ograniczonej widoczności – w nocy czy przy złej pogodzie. Za ich pomocą określa się topografię dna mórz i oceanów oraz bada się zanieczyszczenie ich powierzchni. Są wykorzystywane przez meteorologów do identyfikacji frontów burzowych oraz pomiaru prędkości wiatru i chmur. Na statkach rybackich radary pomagają wykrywać ławice ryb. Bardzo często nazywane są radary lub stacje radarowe (radary). radary. I chociaż teraz to słowo usamodzielniło się, w rzeczywistości jest to skrót powstały z angielskich słów „ radiowykrywanieIzakres », co oznacza „wykrywanie radiowe i określanie odległości” i odzwierciedla istotę radaru. Radar składa się z następujących głównych elementów: Urządzenie nadawcze; Odbiornik; Przełącznik antenowy i urządzenie antenowe; urządzenie końcowe; Synchronizator. Schemat blokowy radaru pokazano na rys. 5.2. Rys.5.2 Schemat blokowy stacji radarowej. Urządzenie nadawcze Zadaniem radaru jest generowanie sygnału sondującego i przesyłanie go do anteny. Odbiornik Radar ma za zadanie wstępne przetwarzanie odbitego sygnału odbieranego przez antenę. Oddziela sygnał użyteczny od mieszaniny sygnału i zakłóceń, przetwarza sygnał radiowy na sygnał wideo i przesyła go do urządzenia końcowego. Przełącznik antenowy przeznaczony do podłączenia nadajnika do anteny w przypadku emisji sygnału sondującego i podłączenia odbiornika do anteny w przypadku odbioru sygnału odbitego. Urządzenie końcowe analizować użyteczny sygnał. Rodzaj urządzenia końcowego zależy od rodzaju sygnału (analogowy lub cyfrowy), odbiorcy informacji radarowej (operator, urządzenie do automatycznego określania pozycji, komputer itp.) oraz rodzaju informacji radarowej. Synchronizator zapewnia zadaną kolejność działania elementów radaru. Na przykład w najpopularniejszych radarach z impulsowym trybem pracy synchronizator spełnia następujące funkcje: Koordynacja momentu powstania impulsu sondującego z momentem rozpoczęcia podstawy czasu wskaźnika lub zliczenia zera urządzenia liczącego; Koordynacja położenia charakterystyki promieniowania anteny w przestrzeni z odchyleniem wskaźnika lub odczytem zera urządzenia obliczeniowego; Określenie momentu otwarcia odbiornika i interwału jego działania. W takim przypadku zasadniczo możliwe są następujące metody synchronizacji: 1. Synchronizacja z nadajnika do urządzenia końcowego. W takich radarach moment powstania impulsu sondującego wyznacza moment rozpoczęcia przemiatania wskaźnika w czasie lub moment zerowania urządzenia liczącego. Zaletą tej metody synchronizacji jest to, że niestabilność częstotliwości powtarzania impulsów sondujących nadajnika nie wpływa na dokładność pomiarów radarowych. Jednakże takie radary charakteryzują się niestabilnością w uruchomieniu urządzenia końcowego, którą trudno całkowicie wyeliminować. 2. Synchronizacja z urządzenia końcowego do nadajnika. W tym przypadku pracą terminala i urządzenia nadawczego steruje wysoce stabilny generator zawarty w urządzeniu końcowym. Dzięki temu osiągana jest wysoka dokładność pomiarów radarowych. Jednakże przy zmianie częstotliwości powtarzania impulsów sondujących pojawiają się problemy. 3. Synchronizacja za pomocą oddzielnego, bardzo stabilnego oscylatora kwarcowego, który nie jest częścią urządzenia nadawczego ani końcowego. Ten sposób synchronizacji stosowany jest w większości nowoczesnych radarów, które zazwyczaj zapewniają możliwość zmiany częstotliwości powtarzania impulsów sondujących w trakcie pracy stacji. Jest to konieczne, aby zapewnić odporność radaru na zakłócenia podczas pracy w warunkach pasywnych lub aktywnych zakłóceń radarowych. Schemat blokowy radaru zależy głównie od jego przeznaczenia, rodzaju sygnału sondującego (impulsowy lub ciągły) oraz modulowanego parametru sygnału radiowego. Jednak w ogólnym przypadku procedura przetwarzania sygnału radiowego w radarze musi być zgodna nie tylko z rodzajem sygnału sondującego, ale także z rodzajem zakłóceń. Dlatego schemat blokowy radaru musi uwzględniać źródła aktywnych i pasywnych zakłóceń elektronicznych. To zadanie komplikuje działanie każdego radaru, ponieważ zakłócenia powodują zniekształcenie sygnału odbitego od celu i prowadzą do utraty przydatnych informacji radarowych. Dlatego też w procesie przetwarzania sygnału odbitego dążą do tłumienia zakłóceń, co osiąga się poprzez wprowadzenie do schematu blokowego radaru elektronicznych urządzeń zabezpieczających przed zakłóceniami.Zobacz także
Literatura
Artykuły Spinki do mankietów
Notatki
sowiecki i rosyjski stacje radarowe
Radar Wojsk Radiotechnicznych
„RUS-1” „RUS-2” „P-3”„P-8 Wołga” „P-10 „Wołga-A””„P-14” „P-18 „Terek”” „P-20” „P-30” „P-35 „Drenaż”” „P-37” „P-40” „P-70 „Lena-M” » „Rezonans-N(E)” „Pierścień” „Kasta” „5N59.19Zh6.35D6/36D6”„Casta-2E” „Gamma-S1E” „Gamma-DE” „Obrona-14”„5N87” „Desna-M” „Przeciwnik-GE”
Wysokościomierze radiowe
„PRV-9” „PRV-10” „PRV-11” „PRV-13” „PRV-16”„PRV-17”
Specjalne radary obrony powietrznej
P-15 P-19 1L117M Desna-M 76N6 96L6E
Stacje radarowe dalekiego zasięgu
Dniepr Dniestr-M Daryal Krona Dunaj Don-2N Duga 1 Wołga Woroneż-M/DM Vitim
Radary lotnicze
Gnejs-2 Gnejs-5 RP-5 Szmaragd-5 Liana Vega-M Trzmiel E-801 Oko N007 Bariera N010 Chrząszcz ( 8-II / 27 / M(S)(E) / (M)F(E) / A(E)) N011 Pręty ( M/29) N035 Irbis N050
Radary pokładowe
Reduta-K Guys-1 Guys-2 Neptune Foot-N Reef Don P-500 Fregata Boletus Furke Monument-A Pal-N 3Р41 3Р95 Flag Podkat
Przeciwbateria i inne radary
Zoo Bocian Farah Credo
Radary przybrzeżne
Jak pojawił się radar?



Jak działa radar?

Zastosowanie radarów