Să începem de la început - ce este radarul și de ce este necesar? În primul rând, aș dori să observ că radarul este o ramură specifică a ingineriei radio care ajută la determinarea diferitelor caracteristici ale obiectelor din jur. Acțiunea radarului are ca scop trimiterea undelor radio de la un obiect către un dispozitiv.
Un radar, o stație radar, este un anumit set de diverse dispozitive și aparate care permit observarea obiectelor. Undele radio care sunt furnizate de radar pot detecta ținta studiată și o pot cartografi analiză detaliată. Undele radio sunt refractate și, parcă, „pictează” o imagine a unui obiect. Stațiile radar pot funcționa în orice condiții meteorologice și pot detecta perfect orice obiecte de pe sol, în aer sau în apă.
Principii de funcționare a radarului
Sistemul de acțiuni este simplu. Undele radio de la stație sunt direcționate către obiecte, atunci când acestea le întâlnesc, undele sunt refractate și reflectate înapoi la radar. Acesta se numește ecou radio. Pentru a detecta acest fenomen, în stație sunt instalate emițătoare și receptoare radio care au sensibilitate ridicată. Anterior, cu doar câțiva ani în urmă, stațiile radar necesitau costuri uriașe. Dar nu acum. Este nevoie de foarte puțin timp pentru ca dispozitivele să funcționeze corect și ca obiectele să fie identificate.
Toate operațiunile radar se bazează nu numai pe reflectarea undelor, ci și pe dispersia acestora.
Unde poate fi folosit radarul?
Domeniul de aplicare al sistemelor radar este destul de larg.
- Prima ramură va fi cea militară. Folosit pentru a identifica ținte terestre, de apă și aer. Radarele monitorizează și supraveghează teritoriul.
- Agricultura si silvicultura. Folosind astfel de stații, specialiștii efectuează cercetări pentru a studia solul și vegetația, precum și pentru a detecta diferite tipuri de incendii.
- Meteorologie. Studierea stării atmosferei și realizarea de prognoze pe baza datelor obținute.
- Astronomie. Oamenii de știință folosesc stații radar pentru a studia obiecte îndepărtate, pulsari și galaxii.
Radar în industria auto
Din 2017, MAI a dezvoltat dezvoltări care vizează crearea unei companii de dimensiuni mici stație radar pentru mașini cu conducere autonomă. Astfel de dispozitive mici de bord vor putea fi instalate în fiecare mașină în viitorul apropiat. În 2018, testarea radarelor non-standard pentru vehicule aeriene fără pilot este deja în curs. Este planificat ca astfel de dispozitive să poată identifica obiectele terestre la o distanță de până la 60 de kilometri, iar obiectele marine - până la 100 km.
Merită să reamintim că în 2017 a fost prezentat și un mic radar aerian dual band. Dispozitivul unic a fost dezvoltat pentru a detecta diferite tipuri de obiecte și obiecte în orice condiții.
Dispozitiv I – indicator. Scop:
Redare pe ecran informatii primare despre mediul care provine de la echipamentul radar.
Determinarea coordonatelor obiectelor de suprafață și rezolvarea grafică a problemelor de navigație.
Sincronizarea și controlul modurilor de funcționare a stației.
Formarea impulsurilor de declanșare pentru dispozitivul de transmisie.
Generarea de impulsuri pentru pornirea dispozitivelor auxiliare.
Formarea impulsurilor de semnal de direcție pentru dispozitivele auxiliare.
Furnizarea de alimentare autonomă pentru propriile unități și dispozitive.
Proiectare și principiu de funcționare:
Dispozitivul I este format din următoarele căi și noduri:
Calea de sincronizare a timpului.
Calea bazei de timp.
Calea dispozitivului de ochire și marcatoarele de distanță.
Calea ghidajului de direcție.
Calea de introducere a informațiilor.
Calea modului de mișcare adevărată.
Afișaj digital al intervalului și direcției.
Tuburi catodice și sisteme de deviere.
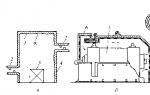
Principiul de funcționare al dispozitivului Și să ne uităm la el diagrama structurala(Fig. 1).
Calea de sincronizare a timpului are un oscilator master (3G), care generează impulsuri master cu o rată de repetare de 3000 impulsuri/sec - pentru scale de gamă de 1 și 2 mile; 1500 impulsuri/sec – pentru cântare de 4 și 8 mile; 750 impulsuri/sec – pentru scalele 16 și 32 mile; 500 imp/sec pentru o scară de 64 mile. Impulsurile master de la 3G sunt furnizate la ieșirea dispozitivului pentru a declanșa dispozitive legate funcțional (în dispozitivul P-3); pentru a porni generatorul de tensiune din dinți de ferăstrău (în calea de sincronizare a timpului);
La rândul lor, impulsurile de sincronizare secundare sunt primite de la Dispozitivul P-3 în calea de sincronizare a dispozitivului, datorită cărora începutul măturarii în rază și direcție este sincronizat cu începutul emisiei de impulsuri de sondare de către Dispozitivul A (antena radar) iar traseul dispozitivului de ochire și a marcajelor de rază este lansată.
Traseul de baleiaj în timp, folosind un generator de scanare, formează și generează o tensiune dinți de ferăstrău, care, după o serie de transformări, este furnizată sistemului de deviere a mișcării relative din tubul catodic și traseului radiogonizorului.
Calea dispozitivului de vizualizare și a marcajelor de distanță este proiectată pentru a forma un telemetru în mișcare (MRF), prin care se asigură vizualizarea obiectelor aflate în rază, iar măsurarea distanței este efectuată de un contor digital electronic. Informațiile despre interval sunt afișate pe afișajul digital TsT-3.
Rotorul transformatorului rotativ al generatorului de scanare se rotește sincron și în fază cu antena, ceea ce asigură rotirea sincronă a scanerului și a antenei, precum și obținerea unui marcaj pentru începerea scanării la momentul maxim al antenei. diagrama de radiație traversează planul liniei centrale a vasului.
Calea indicatorului de direcție constă dintr-un senzor de unghi, generatoare de semnal de citire și decodare și un transformator rotativ pentru scanarea radiometrului. Unghiul de rotație al transformatorului rotativ generat pe traseul radiometrului, format sub forma unui semnal codificat, după decodare, este trimis pe placa de afișare digitală TsT-4.
Calea de intrare a informațiilor este concepută pentru a introduce informații despre intervalul și direcția către obiect pe CRT, precum și pentru a afișa semnalul video care vine de la dispozitivul P-3 pe CRT.
Calea modului de mișcare adevărată este concepută pentru a introduce date despre viteza V s - din jurnal, cursul K s de la girobusola, care este folosită pentru a genera componentele vectorului viteză pe o scară în direcțiile N - S și E - W; pentru a asigura deplasarea marcajului propriei nave pe ecranul CRT în conformitate cu scara selectată, traseul prevede și întoarcerea automată și manuală a marcajului propriei nave la punctul de plecare.
Dispozitiv P-3 – transceiver. Scop:
Dispozitivul P-3 (transceiver) este destinat pentru:
Formarea și generarea de impulsuri de sondare cu microunde;
Recepția, amplificarea și conversia semnalelor radar reflectate într-un semnal video.
Asigurarea funcționării sincrone și în fază în timp a tuturor blocurilor și unităților de dispozitive: I; P – 3; O.
Compoziția dispozitivului:
· unitate de microunde – 3 (unitate de ultraînaltă frecvență).
· Bloc MP (modulator transmițător).
· Bloc FM (filtru modulator).
· Unitate AFC (unitate de reglare automată a frecvenței)
· Bloc UR (amplificator reglabil)
· Bloc UG (amplificator principal)
· Unitate NK – 3 (unitate de reglare și control)
· Unitate ACS (unitate automată de stabilizare și control)
· Subunitate FS (formator de impulsuri de ceas)
· 4 dispozitive redresoare care asigură alimentarea blocurilor și circuitelor dispozitivului P – 3.
Să ne uităm la funcționarea dispozitivului în diagrama bloc.

Calea de generare a semnalului de stabilizare este concepută pentru a genera impulsuri de sincronizare secundare care intră în dispozitiv și, de asemenea, pentru a declanșa modulatorul transmițătorului prin unitatea de stabilizare a controlului automat. Cu ajutorul acestor impulsuri de sincronizare se asigură sincronizarea impulsurilor de sondare cu începutul scanării pe CRT-ul aparatului I.
Calea de generare a impulsurilor de sondare este proiectată pentru a genera impulsuri de microunde și a le transmite de-a lungul ghidului de undă către dispozitivul A. Acest lucru are loc după ce modulatorul de tensiune generează modulația impulsului generatorului de microunde, precum și impulsurile de control și sincronizare ale blocurilor și nodurilor de împerechere.
Calea de generare a semnalului video este concepută pentru a converti impulsurile de microunde reflectate în impulsuri de frecvență intermediară folosind un oscilator local și mixere, formând și amplificând semnalul video care apoi intră în dispozitivul I. Un ghid de undă comun este utilizat pentru a transmite impulsuri de sondare către dispozitivul A și impulsuri reflectate. la calea de generare a semnalului video.
Calea de control și reglare a sursei de alimentare este concepută pentru a genera tensiuni de alimentare pentru toate blocurile și circuitele dispozitivului, precum și pentru a monitoriza performanța surselor de alimentare, a blocurilor funcționale și a componentelor stației, magnetron, oscilator local, eclator etc.
Dispozitivul A este un dispozitiv de antenă. Scop:
Dispozitivul A este proiectat să emită și să primească impulsuri de energie cu microunde și să emită date pe unghiul de direcție al antenei și marcajul de direcție către dispozitivul I. Este o antenă cu fantă de tip corn.
Datele de bază ale dispozitivului A.
Lățimea fasciculului:
În plan orizontal – 0,7° ± 0,1
În plan vertical - 20° ± 0,1
Frecvența de rotație a antenei 19 ± 4 rpm.
Temperatura de funcționare variază de la -40°C la + 65°C
Dimensiuni:
Lungime – 833 mm
Latime – 3427 mm
Înălțime – 554 mm
Greutate - 104 kg.
Structural, dispozitivul este realizat sub forma a 2 blocuri detasabile;
Bloc PA – parte rotativă a antenei
Bloc AR - realizează: formarea energiei cu microunde sub forma unui fascicul radio de forma necesară; radiația dirijată a energiei în spațiu și recepția ei dirijată după reflectarea de la obiectele iradiate.
Funcționarea dispozitivului A.
Un motor electric cu o cutie de viteze este instalat în blocul PA al dispozitivului. Motorul electric este alimentat de la rețeaua navei și asigură rotația circulară a blocului AR al dispozitivului A. Motorul electric, printr-o cutie de viteze, rotește și rotorul transformatorului rotativ de la care dispozitivul I primește, prin sistemul de urmărire, un semnal. despre poziția unghiulară a antenei în raport cu DP-ul navei (unghiul de îndreptare) și, de asemenea, semnalul de direcție al unei nave. Blocul PA conține, de asemenea, o joncțiune rotativă de microunde, concepută pentru a conecta un emițător rotativ (bloc AR) cu o cale staționară a ghidului de undă.
Unitatea AR, care este o antenă cu slot, formează un fascicul radio direcțional de forma necesară. Un fascicul radio emite energie cu microunde în spațiu și asigură recepția direcțională a părții din această energie cu microunde reflectată de obiectele iradiate. Semnalul reflectat, printr-un ghid de undă comun, intră în dispozitivul P-3, unde după o serie de transformări se transformă într-un semnal video.
Blocul PA mai conține un încălzitor termic electric (TEH), conceput pentru a preveni pericolul de înghețare a părților mobile ale dispozitivului A și un filtru pentru eliminarea interferențelor radio industriale.
Dispozitivul KU este un dispozitiv contactor. Scop:
Dispozitivul KU (dispozitiv de contact) este proiectat pentru a conecta radarul la rețeaua de bord, pentru a comuta tensiunea de ieșire a unității mașinii, pentru a proteja antena de suprasarcină și pentru a proteja radarul în cazul încălcării ordinii de oprire a acestuia, precum și să protejeze stația în caz de oprire de urgență a rețelei de bord.
Dispozitivul furnizează o tensiune AC 220V cu o frecvență de 400 Hz dispozitivelor radar la 3 ÷ 6 secunde după pornirea unității mașinii.
În cazul unei opriri de urgență a rețelei de bord, dispozitivul oprește consumatorii în 0,4 ÷ 0,5 s.
Dispozitivul oprește unitatea de antenă după 5 ÷ 20 s. în caz de rotire incorectă a fazelor, în cazul unei întreruperi a uneia dintre faze și în cazul creșterii curentului de sarcină al antenei.
Convertor ALL – 1,5 m. Scop:
Convertorul este proiectat pentru a converti curentul trifazat cu o frecvență de 50 Hz în monofazat AC tensiune 220 V, frecventa 427 Hz. Este o unitate de mașină pe arborele căreia există un motor sincron trifazat și un generator sincron monofazat.
Convertorul asigură pornirea și oprirea locală și de la distanță a unității de alimentare.
MANAGEMENTUL OPERAȚIUNII RADAR.
Funcționarea radarului este controlată de la panoul și panoul de control al dispozitivului I.
Controalele sunt împărțite în operaționale și auxiliare.
Prin utilizarea operațional controale:
Stația se aprinde și se oprește. (27)
Comutator scalele de gamă. (14)
Distanțele până la ținte sunt măsurate cu ajutorul unui telemetru. (15)
Unghiurile de îndreptare și direcția țintelor sunt determinate folosind radiogonitori electronici și mecanici. (28), (29)
Marcarea cursului este dezactivată. (7)
Ele controlează caracterul distinctiv (amplificarea) semnalelor radar și imunitatea la zgomot. (8, 9, 10, 11, 12, 13)
Luminozitatea luminii de fundal a panoului și a scalelor este ajustată. (2)
Prin utilizarea auxiliar controale:
Rotirea antenei este activată și oprită. (26)
Conexiunea dintre indicator și buștean și girobusola este activată.
Citirile scalei în mișcare a vizorului direcțional sunt convenite. (29)
Luminozitatea marcajelor de măturare și de curs sunt reglabile. (22, 23)
AFC este oprit și modul manual pentru reglarea frecvenței oscilatorului local este activat. (27)
Centrul de rotație al scanerului este aliniat cu centrul geometric al radiometrului. (20)
Oscilatorul local al dispozitivului P-3 este reglat.
Modul de monitorizare a performanței generale a radarului este activat. (16, 17, 18, 19)
Alimentarea la modulatorul dispozitivului P-3 este oprită.
Luminozitatea ecranului CRT este setată și fasciculul este focalizat.
Rotatorul antenei este pornit. (26)
Încălzirea antenei este pornită pe dispozitivul KU
Locația comenzilor de pe telecomandă și panoul indicator este prezentată în figură.
 Fig nr. 3. Panoul de control pentru indicatorul radar Naiad-5:
Fig nr. 3. Panoul de control pentru indicatorul radar Naiad-5:
1-“Iluminare scară”; 2-“Iluminare de fundal a panoului”; 3-“Grade”; 4-“Scală - interval”; 5-"Mile"; 6-“PZ”; 7-“Nota cursului”; 8-"Ploaie"; 9-“Luminozitate VN”; 10-„luminozitate VD”; 11-“Luminozitate MD”; 12-"Valuri"; 13-“Întărirea”; 14-“Comutator scară gamă”; 15-"Interval"; 16-"Blocuri"; 17-"Redresoare"; 18-"Control"; 19-"Indicator indicator"; 20-“Setarea centrului”; 21-„RFC-Off”; 22-“Luminozitate OK”; 23-„Luminozitatea scanării”; 24-“Semnale false”; 25-"Control radar"; 26-“Antena – Oprit”; 27-"Radar-Oprit"; 28-“Vezi mecanic”; 29-“Directie”; 30-"Curs-Nord-Nord-ID"; 31-“Resetare la centru”; 32-“Resetare”; 33-“Schimbare centru”; 34-“Contabilitatea demolarii”; 35-"Viteza manuala"
INTRETINERE RADAR.
Înainte de a porni radarul, trebuie să:
Legume şi fructe inspecție externăși asigurați-vă că nu există daune externe ale dispozitivelor și unității.
Setați comenzile în pozițiile indicate în tabel.
| Numele organului de conducere | Poziția comenzilor înainte de a porni indicatorul |
| Comutator „Radar – Oprit” | Buton „Ploaie” Buton „VN Brightness” Buton „VD Brightness” Buton „MD Brightness” Buton „Wave” Buton „Gain” Buton „Scales illumination” Buton „Sweep brightness, OK” Buton „Course – North – North ID” Buton „ Resetare la centru" Regulatoare "Center shift" Regulatoare "Luând în considerare deriva: viteză, direcție" Regulator "Viteză manual" Buton "Semnale false" Comutator comutator "Gyrocompass - Off" |
Comutator „Antenă - Oprit”
"Oprit"
Cel mai din stânga Mijloc Medie Media Cel mai din stânga din mijloc Medie „Curs” fix din fabrică Activat Medie 0 pe o scară digitalizată 0 pe o scară digitalizată Activat „Oprit”
"Oprit"
Restul comenzilor pot rămâne în orice poziție.
Pornirea stației.
Comutatorul de alimentare de la bord este setat în poziția „Pornit” (unitatea de alimentare pornește)
Pe indicator:
Comutați „Radar – oprit” setat pe poziția radar
Comutator „Antenă - oprit” setați pe poziția Antenă.
Porniți butonul operațional P - 3 (mecanismul scalei și inscripțiile explicative ar trebui să se aprindă).
După 1,5 ÷ 2,5 minute. Ecranul CRT ar trebui să afișeze o scanare rotativă, un semn de direcție, marcaje ale intervalului și o linie de direcție.
După 4 minute, ar trebui să apară un semn al pulsului de sondare și semne ale obiectelor din zona de vizualizare a radarului.
Folosind controalele adecvate, selectați luminozitatea optimă a HV; VD; MD; și poziția „Valului”.
Transceiver-ul este pornit folosind un comutator cu buton. (6)
Orientarea imaginii în raport cu adevăratul meridian (nord) sau în raport cu planul central al vasului (curs) în modul de mișcare relativă este realizată de comutatorul 30 prin setarea lui în poziția „nord” sau „curs”. Cu același comutator, setându-l în poziția „nord - ID”, modul de mișcare adevărată este furnizat pe o scară de scară 1; 2; 4; 8 mile.
Centrul de baleiaj este deplasat la punctul selectat de potențiometre (33)
Startul (centrul) scanării revine în centrul CRT cu butoanele 31 și 32.
Datele privind viteza propriei nave pot fi introduse manual (35)
Indicarea digitală a distanței măsurate până la țintă și indicarea direcției se realizează pe afișajele digitale TsT - 3 și TsT - 4 (3; 5)
Monitorizarea performanței radarului este realizată de un sistem încorporat care asigură monitorizarea performanței generale și depanare (16; 17; 18; 19;)
Ei sunt convinși de posibilitatea de a: controla obiectivele domeniului de mare viteză și direcția de înaltă tensiune, precum și dezactivarea semnului de direcție și schimbarea scalei prin comutarea scalelor intervalului.
Verificați: alinierea începutului de măturare cu centrul ecranului (la două poziții reciproc perpendiculare ale radiometrului pe scara de 4 mile). Operabilitatea schemei de orientare a imaginii (girobusola este dezactivată, comutatorul „curs - nord - nord ID” este setat alternativ în pozițiile „curs” și „nord”, asigurându-vă că marcajul cursului își schimbă poziția). După aceea, setați comutatorul în poziția „girocompas” și asigurați-vă că poziția liniei de curs corespunde citirilor repetorului bateriei principale.
Verificați deplasarea centrului de rotație al scanării în modul OD (mânerul „resetare la centru” este setat în poziția oprit, mânerul „deplasare centrală” mută ușor centrul scanării la stânga și la dreapta cu 2 /3 din raza CRT, toate acestea se realizează la 1 2, când este orientată alternativ de-a lungul „cursului” și „nord”.
Folosind butonul „resetare la centru”, aliniez din nou centrul scanării cu centrul „ecranului CRT”.
Ei verifică indicatorul pentru funcționarea în modul ID în acest scop: setați comutatorul în modul „nord - ID”, scara intervalului este setată la 1 milă, opriți jurnalul și girobusola, butonul pentru „contabilitatea deriva” la poziție zero, setați manual o valoare a vitezei arbitrare folosind butonul „resetare” în centru” asigurați-vă că începutul scanării de pe ecran se mișcă de-a lungul cursului la viteza setată. Când mișcarea atinge 2/3 din raza CRT, centrul de scanare ar trebui să revină automat în centrul ecranului. Revenirea începerii măturii la punctul de pornire trebuie să fie asigurată și prin apăsarea manuală a butonului „resetare”.
Folosiți butoanele de „contabilizare a deriva” pentru a introduce o valoare arbitrară pentru corecțiile de direcție și viteză și asigurați-vă că aceasta modifică parametrii pentru mutarea începutului de baleiaj pe ecranul CRT.
Comutatorul „curs - nord - nord ID” este setat pe poziția „curs” sau „nord”. În acest caz, începutul măturii ar trebui să se deplaseze în centrul ecranului și modul OD ar trebui să se activeze. Același lucru ar trebui să se întâmple atunci când setați scalele intervalului la 16; 32; 64 de mile.
Verificați schimbarea manuală a începerii scanării în modul ID: dezactivați butonul „resetare la centru”, setați comenzile „deplasare centrală” într-o poziție care să asigure o schimbare a începerii scanării cu o sumă mai mică decât 2/3 din raza CRT, apăsați butonul „resetare” și asigurați-vă că matura centrală s-a mutat la punctul selectat și a început să se deplaseze la direcție dată. După ce s-a deplasat cu 2/3 din raza ecranului, centrul de scanare revine automat la punctul selectat.
Performanța stației este monitorizată de un sistem încorporat care asigură monitorizarea și depanarea. Sistemul este format din elemente incluse ca unități separate în blocul de dispozitive și stație.
Performanța dispozitivului P-3 este monitorizată folosind unitatea NK-3 situată în acesta, care verifică funcționalitatea surselor de alimentare și a blocurilor și ansamblurilor funcționale.
Monitorizarea performanței dispozitivului I și căutarea unei surse de alimentare defectuoase sau a unității funcționale se realizează folosind unitatea de control încorporată situată pe panoul de control al dispozitivului I.
STAȚIA ESTE OPRITĂ:
· Scoaterea alimentării utilizând comutatorul „Radar – oprit”.
· Deconectarea tensiunii rețelei de bord (butonul „stop” al starterului)
· Deconectarea tensiunii de la elementele de comunicare cu bușteanul și girocompasul.
Stație radar
Solicitarea pentru „radar” este redirecționată aici; despre registru medicamente vezi Registrul medicamentelor.
Stație radar(radar) sau radar(engleză) radar din R.A. dio D ecție O nd R pescuit- detecție și distanță radio) - un sistem pentru detectarea obiectelor din aer, mare și sol, precum și pentru determinarea razei, vitezei și parametrilor geometrici ai acestora. Utilizează o metodă bazată pe emisia de unde radio și înregistrarea reflexiilor acestora de la obiecte. Termenul-acronimul englez a apărut în 1941 ulterior, în scrierea lui, literele mari au fost înlocuite cu minuscule;
Poveste
În URSS și Rusia
În Uniunea Sovietică, conștientizarea necesității mijloacelor de detectare a aeronavelor libere de dezavantajele supravegherii sonore și optice a condus la dezvoltarea cercetării în domeniul radarului. Ideea propusă de tânărul artilerist Pavel Oșcepkov a primit aprobarea înaltului comandament: Comisarul Poporului al Apărării al URSS K. E. Voroșilov și adjunctul său, M. N. Tuhacevsky.
În 1946, specialiștii americani - Raymond și Hacherton, fost angajat Ambasada SUA la Moscova a scris: „Oamenii de știință sovietici au dezvoltat cu succes teoria radarului cu câțiva ani înainte ca radarul să fie inventat în Anglia”.
Clasificare
După domeniul de aplicare se disting- militar;
- civil;
- radar de detectare;
- Radar de control și urmărire;
- radare panoramice;
- radar cu vedere laterală;
- radare meteorologice;
- Radar de desemnare a țintei;
- Radar de supraveghere a situației;
- Radar de coastă
- radare navale
- Radarele aeropurtate
- Radar mobile
- Primar sau pasiv
- Secundar sau activ
- Combinate
- Radar peste orizont
- Metru
- decimetru
- Centimetru
- Milimetru
Proiectarea și principiul de funcționare a radarului primar
Radarul primar (pasiv) servește în principal la detectarea țintelor prin iluminarea lor cu o undă electromagnetică și apoi primirea reflexiilor (ecourile) acestei unde de la țintă. Pentru că viteza unde electromagnetice constantă (viteza luminii), devine posibilă determinarea distanței până la țintă pe baza măsurării diferiților parametri de propagare a semnalului.
O stație radar se bazează pe trei componente: emițător, antenă și receptor.
Transmiţător(dispozitiv de transmisie) este o sursă de semnal electromagnetic de mare putere. Poate fi un generator de impulsuri puternic. Pentru radarele cu rază de centimetri în impulsuri, este de obicei un magnetron sau un generator de impulsuri care funcționează conform următoarei scheme: un oscilator principal este un amplificator puternic, cel mai adesea folosind o lampă cu undă de călătorie ca generator, iar pentru radarele cu rază de măsură, o lampă triodă este des folosit. În funcție de design, emițătorul funcționează fie în modul de impuls, generând impulsuri electromagnetice scurte și puternice repetate, fie emite un semnal electromagnetic continuu.
Antenă realizează focalizarea semnalului emițătorului și formarea unui model de radiație, precum și recepția semnalului reflectat de la țintă și transmiterea acestui semnal către receptor. În funcție de implementare, semnalul reflectat poate fi recepționat fie de aceeași antenă, fie de o alta, care poate fi uneori amplasată la o distanță considerabilă de dispozitivul emițător. Dacă transmisia și recepția sunt combinate într-o antenă, aceste două acțiuni sunt efectuate alternativ și pentru ca semnalul puternic care se scurge de la emițătorul de transmisie către receptor să nu orbească receptorul de ecou slab, în fața receptorului este plasat un dispozitiv special care închide intrarea receptorului în momentul emiterii semnalului de palpare.
Receptor (dispozitivul de recepție) realizează amplificarea și procesarea semnalului primit. În chiar caz simplu semnalul rezultat este transmis unui tub de fascicul (ecran), care afișează o imagine sincronizată cu mișcarea antenei.
Diferite radare se bazează pe diferite metode de măsurare a semnalului reflectat:
Metoda frecvenței
Metoda de măsurare a intervalului de frecvență se bazează pe utilizarea modulării în frecvență a semnalelor continue emise. În această metodă, o frecvență este emisă pe o perioadă care variază liniar de la f1 la f2. Semnalul reflectat va sosi modulat liniar la un moment de timp care precede prezentul cu timpul de întârziere. Că. frecventa semnalului reflectat primit la radar va depinde proportional de timp. Timpul de întârziere este determinat de o schimbare bruscă a frecvenței semnalului de diferență.
Avantaje:
- vă permite să măsurați distanțe foarte scurte;
- se folosește un transmițător de putere redusă;
Defecte:
- sunt necesare două antene;
- deteriorarea sensibilității receptorului din cauza scurgerii prin antenă în calea de recepție a radiației emițătorului, supusă unor modificări aleatorii;
- cerințe ridicate pentru liniaritatea modificărilor de frecvență;
Acestea sunt principalele sale dezavantaje.
Metoda fazelor
Metoda radarului de fază (coerent) se bazează pe izolarea și analiza diferenței de fază dintre semnalele transmise și reflectate, care apare din cauza efectului Doppler atunci când semnalul este reflectat de la un obiect în mișcare. În acest caz, dispozitivul de transmisie poate funcționa atât în mod continuu, cât și în modul impuls. Principalul avantaj al acestei metode este că „vă permite să observați doar obiectele în mișcare, iar acest lucru elimină interferența de la obiectele staționare situate între echipamentul de recepție și țintă sau în spatele acestuia”.
Deoarece sunt utilizate unde ultrascurte, intervalul clar de măsurare a intervalului este de ordinul câțiva metri. Prin urmare, în practică, se folosesc circuite mai complexe, în care sunt prezente două sau mai multe frecvențe.
Avantaje:
- radiații de putere redusă, deoarece se generează oscilații neamortizate;
- acuratețea nu depinde de deplasarea frecvenței Doppler a reflexiei;
- dispozitiv destul de simplu;
Defecte:
- lipsa rezoluției intervalului;
- deteriorarea sensibilității receptorului datorită pătrunderii radiației emițătorului prin antenă în calea de recepție, sub rezerva unor modificări aleatorii;
Metoda pulsului
Radarele moderne de urmărire sunt construite ca radare cu impulsuri. Radarul cu impulsuri transmite semnalul de transmisie doar pentru o perioadă foarte scurtă de timp, într-un impuls scurt (de obicei aproximativ o microsecundă), după care intră în modul de recepție și ascultă ecoul reflectat de la țintă în timp ce pulsul radiat se propagă prin spațiu.
Deoarece pulsul se deplasează departe de radar cu o viteză constantă, timpul care se scurge din momentul în care pulsul este trimis până la primirea răspunsului ecoului este o dependență directă de distanța până la țintă. Următorul impuls poate fi trimis doar după un timp, și anume după ce pulsul revine (aceasta depinde de raza de detectare a radarului, puterea emițătorului, câștigul antenei, sensibilitatea receptorului). Dacă pulsul este trimis mai devreme, ecoul pulsului anterior de la o țintă îndepărtată poate fi confundat cu ecoul unui al doilea impuls de la o țintă apropiată.
Se numește intervalul de timp dintre impulsuri interval de repetare a pulsului, reciproca sa este un parametru important numit rata de repetare a pulsului(IPC). Radarele cu rază lungă de acțiune, cu frecvență joasă au de obicei un interval de repetiție de câteva sute de impulsuri pe secundă. Rata de repetiție a pulsului este una dintre caracteristicile distinctive prin care este posibilă determinarea de la distanță a modelului radar.
Avantajele metodei de măsurare a intervalului de puls:
- capacitatea de a construi un radar cu o antenă;
- simplitatea dispozitivului indicator;
- Comoditatea de a măsura intervalul mai multor ținte;
- simplitatea impulsurilor emise, cu o durată foarte scurtă, și a semnalelor primite;
Defecte:
- Necesitatea de a utiliza puteri mari ale impulsurilor transmițătorului;
- incapacitatea de a măsura distanțe scurte;
- zonă moartă mare;
Eliminarea interferențelor pasive
Una dintre principalele probleme ale radarelor cu impulsuri este eliminarea semnalului reflectat de obiectele staționare: suprafata pamantului, dealuri înalte etc. Dacă, de exemplu, un avion este situat pe un deal înalt, semnalul reflectat de pe acest deal va bloca complet semnalul de la avion. Pentru radarele de la sol, această problemă se manifestă atunci când lucrați cu obiecte care zboară joase. Pentru radarele cu impulsuri aeropurtate, se exprimă prin faptul că reflexia de pe suprafața pământului ascunde toate obiectele care se află sub aeronavă cu radarul.
Metode de eliminare a interferenței folosesc, într-un fel sau altul, efectul Doppler (frecvența unei unde reflectată de un obiect care se apropie crește, iar de la un obiect care pleacă scade).
Cel mai simplu radar care poate detecta o țintă în interferență este radar cu selecția țintei în mișcare(PDS) - un radar cu impulsuri care compară reflecțiile de la mai mult de două sau mai multe intervale de repetare a impulsurilor. Orice țintă care se mișcă față de radar produce o modificare a parametrului semnalului (etapă în SDC serial), în timp ce interferența rămâne neschimbată. Eliminarea interferenței are loc prin scăderea reflexiilor din două intervale consecutive. În practică, eliminarea zgomotului poate fi efectuată în dispozitive speciale - compensatoare de perioadă sau algoritmi în software.
Sistemele de operare CRT au o slăbiciune fundamentală: sunt oarbe la ținte cu viteze circulare specifice (care produc schimbări de fază de exact 360 de grade), iar astfel de ținte nu sunt fotografiate. Viteza cu care o țintă dispare de radar depinde de frecvența de funcționare a stației și de rata de repetiție a pulsului. PRF-urile moderne emit impulsuri multiple la rate de repetiție diferite - astfel încât vitezele invizibile la fiecare rată de repetare a impulsurilor sunt captate de alte PRF.
O altă modalitate de a scăpa de interferență este implementată în radare puls-Doppler, care utilizează o procesare mult mai complexă decât radarele cu SDC.
O proprietate importantă a radarelor puls-Doppler este coerența semnalului. Aceasta înseamnă că semnalele și reflexiile trimise trebuie să aibă o anumită dependență de fază.
Radarele Doppler cu impulsuri sunt, în general, considerate a fi superioare radarelor MDT la detectarea țintelor care zboară joase în dezordinea solului multiple și sunt tehnica preferată folosită în avioanele de luptă moderne pentru interceptarea aeropurtată/controlul focului (exemplele sunt AN/APG-63, 65, radare 66, 67 și 70). Într-un radar Doppler modern, cea mai mare parte a procesării este efectuată de un procesor separat în formă digitală folosind procesoare de semnal digital, folosind de obicei algoritmul Fast Fourier Transform de înaltă performanță pentru a transforma datele digitale ale modelelor de reflexie în ceva mai ușor de gestionat de alți algoritmi. Procesoarele digitale de semnal sunt foarte flexibile, deoarece algoritmii utilizați în ele pot fi înlocuiți rapid cu alții, schimbând doar programul din memoria dispozitivului (ROM „firmware”), astfel, dacă este necesar, adaptându-se rapid la tehnica de bruiaj a inamicului.
Domenii radar
| Gamă | Etimologie | Frecvențele | Lungime de undă | Note |
|---|---|---|---|---|
| HF | engleză frecventa inalta | 3-30 MHz | 10-100 m | Radar de la Garda de Coastă, radare „de peste orizont”. |
| P | engleză anterior | < 300 МГц | > 1 m | Folosit la primele radare |
| VHF | engleză frecventa foarte mare | 50-330 MHz | 0,9-6 m | Detectare pe distanță lungă, explorare Pământului |
| UHF | engleză frecvență ultra înaltă | 300-1000 MHz | 0,3-1 m | Detectarea la distanțe mari (de exemplu, bombardarea artileriei), explorarea pădurilor, a suprafeței Pământului |
| L | engleză Lung | 1-2 GHz | 15-30 cm | supravegherea si controlul traficului aerian |
| S | engleză Scurt | 2-4 GHz | 7,5-15 cm | controlul traficului aerian, meteorologie, radar maritim |
| C | engleză Compromite | 4-8 GHz | 3,75-7,5 cm | meteorologie, transmisie prin satelit, interval intermediar între X și S |
| X | 8-12 GHz | 2,5-3,75 cm | controlul armelor, ghidarea rachetelor, radar maritim, vreme, cartografiere cu rezoluție medie; în SUA, banda de 10,525 GHz ± 25 MHz este utilizată în radarele de aeroport | |
| K u | engleză sub K | 12-18 GHz | 1,67-2,5 cm | cartografiere rezoluție înaltă, altimetrie prin satelit |
| K | german kurz- "scurt" | 18-27 GHz | 1,11-1,67 cm | utilizarea este limitată datorită absorbției puternice de către vaporii de apă, deci se folosesc intervalele K u și K a. Banda K este folosită pentru detectarea în cloud, în radarele de trafic ale poliției (24.150 ± 0.100 GHz). |
| K a | engleză deasupra lui K | 27-40 GHz | 0,75-1,11 cm | Cartografiere, controlul traficului aerian cu rază scurtă de acțiune, radare speciale care controlează camerele de trafic (34.300 ± 0.100 GHz) |
| mm | 40-300 GHz | 1-7,5 mm | unde milimetrice, împărțite în următoarele două intervale | |
| V | 40-75 GHz | 4,0-7,5 mm | Dispozitive medicale EHF utilizate pentru fizioterapie | |
| W | 75-110 GHz | 2,7-4,0 mm | senzori în vehicule automate experimentale, cercetare meteorologică de înaltă precizie |
Radar secundar
„Radarul secundar” este folosit în aviație pentru identificarea aeronavelor. Caracteristica principală este utilizarea unui transponder activ pe aeronave.
Principiul de funcționare al radarului secundar este oarecum diferit de principiul radarului primar. Stația Radar Secundară se bazează pe următoarele componente: transmițător, antenă, generatoare de marcatori azimut, receptor, procesor de semnal, indicator și transponder de avion cu antenă.
Transmiţător- servește la emiterea de impulsuri de solicitare în antenă la o frecvență de 1030 MHz
Antenă- serveste la emisia si receptia semnalului reflectat. Conform standardelor ICAO pentru radarul secundar, antena emite la o frecvență de 1030 MHz și recepționează la o frecvență de 1090 MHz.
Generatoare de markeri azimut- servesc la generare semne de azimut (Pulsul de schimbare a azimutului sau ACP) și generație Marcaje nordice (Azimuth Reference Pulse sau ARP). Într-o singură revoluție antene radar Sunt generate 4096 de mărci de azimut mici (pentru sistemele vechi) sau 16384 de semne de azimut mici (pentru sistemele noi, ele sunt numite și semne de azimut mici îmbunătățite (Impuls de schimbare a azimutului îmbunătățit sau IACP), precum și un semn de nord. Marcajul de nord provine de la generatorul de semne de azimut la Aceasta este poziția antenei atunci când este îndreptată spre nord, iar semnele mici de azimut servesc la măsurarea unghiului de rotație al antenei.
Receptor- serveste la receptia impulsurilor la o frecventa de 1090 MHz.
Procesor de semnal- serveste la procesarea semnalelor primite.
Indicator- servește la indicarea informațiilor prelucrate.
Transponder de avion cu antenă- servește la transmiterea unui semnal radio cu impulsuri care conține informații suplimentare înapoi către radar la primirea unui semnal radio de solicitare.
Principiul de funcționare al radarului secundar este utilizarea energiei transponderului aeronavei pentru a determina poziția aeronavei. Radarul iradiază spațiul înconjurător cu impulsuri de interogare la frecvențele P1 și P3, precum și un impuls de suprimare P2 la o frecvență de 1030 MHz. Aeronava echipată cu transpondere amplasate în zona de acoperire a fasciculului de interogare, la primirea impulsurilor de interogare, dacă este în vigoare condiția P1,P3>P2, răspund radarului solicitant cu o serie de impulsuri codificate la o frecvență de 1090 MHz. , care conțin Informații suplimentare despre numărul plăcii, înălțimea și așa mai departe. Răspunsul transponderului aeronavei depinde de modul de solicitare radar, iar modul de solicitare este determinat de intervalul de timp dintre impulsurile de solicitare P1 și P3, de exemplu, în modul de solicitare A (modul A), intervalul de timp dintre solicitarea stației impulsurile P1 și P3 este de 8 microsecunde și la primirea unei astfel de solicitări transponderul, aeronava își codifică numărul de avion în impulsurile de răspuns.
În modul de solicitare C (modul C), intervalul de timp dintre impulsurile de solicitare a stației este de 21 de microsecunde și la primirea unei astfel de solicitări, transponderul aeronavei își codifică altitudinea în impulsurile de răspuns. Radarul poate trimite o cerere și într-un mod mixt, de exemplu Mod A, Mod C, Mod A, Mod C. Azimutul aeronavei este determinat de unghiul de rotație al antenei, care la rândul său este determinat prin calcul mici semne de azimut.
Intervalul este determinat de întârzierea răspunsului primit. Dacă aeronava se află în raza lobilor laterali, și nu faza principală, sau este situată în spatele antenei, atunci transponderul aeronavei, atunci când primește o solicitare de la radar, va primi la intrare condiția care pulsează P1, P3. Semnalul primit de la transponder este procesat de receptorul radar, apoi merge la procesorul de semnal, care procesează semnalele și oferă informații utilizatorului final și (sau) indicatorului de control. Avantajele unui radar secundar: Undele radio trimise în spațiu călătoresc cu viteza luminii. Dar de îndată ce întâlnesc un obiect pe drum, de exemplu, un avion sau o navă, se reflectă din el și se întorc. În consecință, cu ajutorul lor este posibilă detectarea diferitelor obiecte îndepărtate, observarea acestora și determinarea coordonatele și parametrii acestora. Detectarea locației obiectelor folosind unde radio este numită radar. Alexandru Stepanovici Popov
În 1897, în timpul sesiunilor experimentale de comunicații radio între transportul maritim „Europa” și crucișătorul „Africa”, conduse de fizicianul rus Alexander Stepanovici Popov, a fost descoperit un fenomen interesant. S-a dovedit că propagarea corectă a undei electromagnetice a fost distorsionată de toate obiectele metalice - catarge, țevi, unelte, atât pe nava de la care a fost trimis semnalul, cât și pe nava unde a fost primit. Când crucișătorul „locotenentul Ilyin” a apărut între aceste nave, comunicarea radio dintre ele a fost întreruptă. Așa a fost descoperit fenomenul de reflectare a undelor radio din corpul unei nave. Dar dacă undele radio pot fi reflectate de la o navă, atunci navele pot fi detectate cu ajutorul lor. Și în același timp și alte obiective. Și deja în 1904, inventatorul german Christian Hülsmeier a solicitat primul radar, iar în 1905 a primit un brevet pentru utilizarea efectului de reflectare a undelor radio pentru a căuta nave. Și un an mai târziu, în 1906, a propus utilizarea acestui efect pentru a determina distanța până la un obiect care reflectă undele radio. Christian Hülsmeier
În 1934, fizicianul scoțian Robert Alexander Watson-Watt a primit un brevet pentru invenția sa a unui sistem de detectare a obiectelor din aer și a demonstrat unul dintre primele astfel de dispozitive în anul următor. Robert Alexander Watson-Watt
Determinarea locației a ceva se numește locaţie. În acest scop, tehnologia folosește un dispozitiv numit localizator. Localizatorul emite un anumit tip de energie, de exemplu, sunet sau un semnal optic, către obiectul dorit și apoi primește semnalul reflectat de la acesta. Radar folosește unde radio în acest scop. De fapt, un radar, sau o stație radar (radar), este un sistem complex. Designurile diferitelor radare pot varia, dar principiul funcționării lor este același. Un transmițător radio trimite unde radio în spațiu. După ce au atins scopul, se reflectă din el, ca dintr-o oglindă, și se întorc înapoi. Acest tip de radar se numește activ. Componentele principale ale unui radar sunt un transmițător, o antenă, un comutator de antenă, un receptor și un indicator. Pe baza metodei de emitere a undelor radio, radarele sunt împărțite în pulsate și continue. Cum funcționează radarul cu puls? Emițătorul de unde radio este pornit pentru o perioadă scurtă de timp, astfel încât undele radio sunt emise în impulsuri. Ei intră în antenă, care este situată la focarul unei oglinzi în formă de paraboloid. Acest lucru este necesar pentru ca undele radio să se propage într-o anumită direcție. Funcționarea unui radar este similară cu funcționarea unui reflector de lumină, ale cărui raze sunt îndreptate în mod similar către cer și, luminându-l, caută obiectul dorit. Dar munca reflectoarelor se limitează la asta. Iar radarul nu numai că trimite unde radio, dar primește și un semnal reflectat de la obiectul găsit (eco radio). Această funcție este îndeplinită de receptor. Antena radar cu impulsuri funcționează fie pentru transmisie, fie pentru recepție. Există un comutator în acest scop. De îndată ce semnalul radio este trimis, emițătorul este oprit și receptorul este pornit. Există o pauză, timp în care radarul pare să „asculte” emisiunea și așteaptă un ecou radio. Și de îndată ce antena prinde semnalul reflectat, receptorul se oprește imediat și emițătorul pornește. Și așa mai departe. Mai mult, timpul de pauză poate fi de multe ori mai mare decât durata pulsului. Astfel, semnalele emise și recepționate sunt separate în timp. Semnalul radio primit este amplificat și procesat. Indicatorul, care în cel mai simplu caz este un afișaj, afișează informații procesate, de exemplu, dimensiunea unui obiect sau distanța până la acesta, sau ținta în sine și împrejurimile sale. Undele radio traversează spațiul cu viteza luminii. Prin urmare, cunoscând ora t
De la emiterea unui impuls de semnal radio până la revenirea acestuia, se poate determina distanța până la obiect. R=
cˑ
t/2
, Unde Cu
– viteza luminii. Radar cu undă continuă
emite continuu unde radio de inalta frecventa. Prin urmare, antena preia și un semnal reflectat continuu. În funcționarea lor, astfel de radare folosesc efectul Doppler. Esența acestui efect este că frecvența semnalului reflectat de la un obiect care se deplasează spre radar este mai mare decât frecvența semnalului reflectat de la un obiect care se îndepărtează de acesta, în ciuda faptului că frecvența semnalului emis este constantă. Prin urmare, astfel de radare sunt folosite pentru a determina parametrii unui obiect în mișcare. Un exemplu de radar bazat pe efectul Doppler este un radar folosit de poliția rutieră pentru a determina viteza unui vehicul în mișcare. În căutarea unui obiect, fasciculul direcțional al antenei radar scanează spațiul, descriind un cerc complet sau selectând un anumit sector. Poate fi îndreptată de-a lungul unei linii elicoidale, în spirală. Vederea poate fi, de asemenea, conică sau liniară. Totul depinde de sarcina pe care trebuie să o îndeplinească. Dacă este necesar să monitorizați în mod constant o țintă în mișcare selectată, antena radar este în mod constant îndreptată spre ea și se rotește după ea folosind sisteme speciale de urmărire. Stațiile radar au fost folosite pentru prima dată în timpul celui de-al Doilea Război Mondial pentru a detecta avioanele militare, navele și submarinele. Astfel, la sfârșitul lui decembrie 1943, radarele instalate pe navele britanice au ajutat la detectarea unui cuirasat fascist care a părăsit noaptea portul Altenfiord din Norvegia pentru a intercepta nave militare. Focul de pe vasul de luptă a fost foarte precis și în curând s-a scufundat. Primele radare nu erau foarte avansate, spre deosebire de cele moderne, care protejează în mod fiabil spațiul aerian de raidurile aeriene și atacurile cu rachete, recunoscând aproape orice ținte militare pe uscat și pe mare. Ghidarea radar este utilizată în rachetele de orientare pentru recunoașterea terenului. Radarele monitorizează zborurile rachetelor intercontinentale. Radarele și-au găsit aplicația în viața civilă. Piloții care ghidează navele prin strâmtori înguste și controlorii de trafic aerian din aeroporturile care supraveghează zborurile aeronavelor civile nu pot face fără ei. Sunt indispensabile atunci când navighează în condiții de vizibilitate limitată - noaptea sau pe vreme rea. Cu ajutorul lor, se determină topografia fundului mărilor și oceanelor și se studiază contaminarea suprafețelor acestora. Ele sunt folosite de meteorologi pentru a identifica fronturile de furtună și pentru a măsura viteza vântului și norii. Pe navele de pescuit, radarele ajută la detectarea bancilor de pești. Foarte des sunt numite radare sau stații radar (radare). radare. Și deși acum acest cuvânt a devenit independent, de fapt este o abreviere care a apărut din cuvintele englezești „ radiodetectareşivariind », care înseamnă „detecție și distanță radio” și reflectă esența radarului. Radarul constă din următoarele elemente principale: Dispozitiv de transmisie; Receptor; Comutator de antenă și dispozitiv de antenă; Dispozitiv terminal; Sincronizator. Schema bloc a radarului este prezentată în Fig. 5.2. Fig.5.2 Schema bloc a unei stații radar. Dispozitiv de transmisie Radarul este conceput pentru a genera un semnal sonor și a-l transmite către antenă. Receptor Radarul este proiectat pentru a preprocesa semnalul reflectat primit de antenă. Separă semnalul util de un amestec de semnal și interferență, transformă semnalul radio într-un semnal video și îl transmite dispozitivului terminal. Comutator de antenă conceput pentru a conecta transmițătorul la antenă atunci când emite un semnal de sondare și conectarea receptorului la antenă la recepția semnalului reflectat. Dispozitivul final pentru a analiza semnalul util. Tipul dispozitivului terminal depinde de tipul de semnal (analogic sau digital), de destinatarul informațiilor radar (operator, dispozitiv automat de determinare a poziției, calculator etc.) și de tipul informațiilor radar. Sincronizator furnizează o secvență dată de funcționare a elementelor radar. De exemplu, în cele mai comune radare cu un mod de operare în impulsuri, sincronizatorul îndeplinește următoarele funcții: Coordonarea momentului de formare a pulsului de sondare cu momentul pornirii bazei de timp a indicatorului sau numărarea zero a dispozitivului de calcul; Coordonarea poziției diagramei de radiație a antenei în spațiu cu măsurarea indicatorului sau citirea zero a dispozitivului de calcul; Determinarea momentului deschiderii receptorului și a intervalului de funcționare a acestuia. În acest caz, următoarele metode de sincronizare sunt în mod fundamental posibile: 1. Sincronizarea de la transmițător la dispozitivul terminal. În astfel de radare, momentul formării pulsului de sondare determină momentul începerii mărturii temporale a indicatorului sau momentul punerii la zero a dispozitivului de calcul. Avantajul acestei metode de sincronizare este că instabilitatea ratei de repetiție a impulsurilor de sondare a transmițătorului nu afectează acuratețea măsurătorilor radar. Cu toate acestea, astfel de radare sunt caracterizate de instabilitate în lansarea dispozitivului terminal, care este greu de eliminat complet. 2. Sincronizarea de la dispozitivul terminal la transmițător. În acest caz, funcționarea terminalului și a dispozitivului de transmisie este controlată de un generator foarte stabil inclus în dispozitivul terminal. Datorită acestui fapt, se obține o precizie ridicată a măsurătorilor radar. Cu toate acestea, apar probleme la modificarea ratei de repetare a impulsurilor de sondare. 3. Sincronizare folosind un oscilator cu cuarț foarte stabil separat, care nu face parte din dispozitivul de transmisie sau terminal. Această metodă de sincronizare este utilizată în majoritatea radarelor moderne, care oferă de obicei capacitatea de a modifica rata de repetiție a impulsurilor de sondare în timpul funcționării stației. Acest lucru este necesar pentru a asigura imunitatea radarului la zgomot atunci când funcționează în condiții de interferență radar pasivă sau activă. Schema bloc a unui radar depinde în principal de scopul acestuia, de tipul semnalului de sondare (puls sau continuu) și de parametrul modulat al semnalului radio. Cu toate acestea, în cazul general, procedura de procesare a unui semnal radio într-un radar trebuie să fie în concordanță nu numai cu tipul de semnal de sondare, ci și cu tipul de interferență. Prin urmare, schema bloc radar trebuie să țină cont de sursele de interferență electronică activă și pasivă. Această sarcină complică operarea oricărui radar, deoarece interferența determină distorsiunea semnalului reflectat de țintă și duce la pierderea informațiilor utile radar. Prin urmare, în procesul de procesare a semnalului reflectat, ei se străduiesc să suprima interferența, care se realizează prin introducerea dispozitivelor electronice de protecție a interferențelor în diagrama bloc radar.Vezi de asemenea
Literatură
Articole Legături
Note
sovietic și rus stații radar
Radarul Trupelor Tehnice Radio
"RUS-1" "RUS-2" "P-3""P-8 Volga" "P-10 "Volga-A""„P-14” „P-18 „Terek”” „P-20” „P-30” „P-35 „Drenaj”” „P-37” „P-40” „P-70 „Lena-M” » „Rezonanță-N(E)” „Inel” „Casta” „5N59.19Zh6.35D6/36D6”"Casta-2E" „Gamma-S1E” "Gamma-DE" "Apărare-14"„5N87” „Desna-M” „Adversar-GE”
Radioaltimetre
„PRV-9” „PRV-10” „PRV-11” „PRV-13” „PRV-16”„PRV-17”
radare speciale de apărare aeriană
P-15 P-19 1L117M Desna-M 76N6 96L6E
Stații radar cu rază lungă de acțiune
Dnepr Dnestr-M Daryal Krona Dunăre Don-2N Duga 1 Volga Voronezh-M/DM Vitim
Radar de aviație
Gneiss-2 Gneiss-5 RP-5 Emerald-5 Liana Vega-M Bumblebee E-801 Eye N007 Barier N010 Beetle ( 8-II / 27 / M(S)(E) / (M)F(E) / A(E)) N011 Bare ( M/29) N035 Irbis N050
Radar de bord
Redoubt-K Guys-1 Guys-2 Neptune Foot-N Reef Don P-500 Fregate Boletus Furke Monument-A Pal-N 3Р41 3Р95 Flag Podkat
Contrabaterie și alte radare
Barza Zoo Farah Credo
Radar de coastă
Cum a apărut radarul?



Cum funcționează radarul?

Aplicarea radarelor