เริ่มจากจุดเริ่มต้นกันก่อน - เรดาร์คืออะไรและทำไมจึงจำเป็น? ก่อนอื่น ฉันอยากจะทราบว่าเรดาร์เป็นสาขาเฉพาะของวิศวกรรมวิทยุที่ช่วยในการกำหนดลักษณะต่างๆ ของวัตถุรอบๆ การกระทำของเรดาร์มีวัตถุประสงค์เพื่อส่งคลื่นวิทยุจากวัตถุไปยังอุปกรณ์
เรดาร์ สถานีเรดาร์ คือชุดของอุปกรณ์และอุปกรณ์ต่างๆ ที่ช่วยให้สามารถสังเกตวัตถุได้ คลื่นวิทยุที่ส่งมาจากเรดาร์สามารถตรวจจับเป้าหมายที่กำลังศึกษาและสร้างแผนที่ได้ การวิเคราะห์โดยละเอียด- คลื่นวิทยุจะหักเหและในขณะเดียวกันก็ "วาดภาพ" ภาพของวัตถุ สถานีเรดาร์สามารถทำงานได้ในทุกสภาพอากาศ และตรวจจับวัตถุใดๆ บนพื้นดิน ในอากาศ หรือในน้ำได้อย่างสมบูรณ์แบบ
หลักการทำงานของเรดาร์
ระบบการดำเนินการนั้นง่าย คลื่นวิทยุจากสถานีจะมุ่งตรงไปยังวัตถุ เมื่อพบพวกมัน คลื่นจะหักเหและสะท้อนกลับไปยังเรดาร์ สิ่งนี้เรียกว่าวิทยุสะท้อน เพื่อตรวจจับปรากฏการณ์นี้ จึงได้ติดตั้งเครื่องส่งสัญญาณวิทยุและเครื่องรับวิทยุที่มีความไวสูงไว้ในสถานี ก่อนหน้านี้ เมื่อสองสามปีที่แล้ว สถานีเรดาร์ต้องใช้ต้นทุนมหาศาล แต่ไม่ใช่ตอนนี้ ใช้เวลาน้อยมากเพื่อให้อุปกรณ์ทำงานได้อย่างถูกต้องและระบุวัตถุได้
การทำงานของเรดาร์ทั้งหมดไม่เพียงแต่ขึ้นอยู่กับการสะท้อนของคลื่นเท่านั้น แต่ยังขึ้นอยู่กับการกระจายตัวของคลื่นด้วย
สามารถใช้เรดาร์ได้ที่ไหน?
ขอบเขตการใช้งานระบบเรดาร์ค่อนข้างกว้าง
- สาขาแรกจะเป็นสาขาทหาร ใช้เพื่อระบุเป้าหมายภาคพื้นดิน น้ำ และทางอากาศ เรดาร์ติดตามและสำรวจอาณาเขต
- เกษตรกรรมและป่าไม้ ผู้เชี่ยวชาญจะใช้สถานีดังกล่าวเพื่อทำการวิจัยเพื่อศึกษาดินและพืชพรรณ ตลอดจนตรวจจับไฟประเภทต่างๆ
- อุตุนิยมวิทยา. ศึกษาสภาพบรรยากาศและพยากรณ์ตามข้อมูลที่ได้รับ
- ดาราศาสตร์. นักวิทยาศาสตร์ใช้สถานีเรดาร์เพื่อศึกษาวัตถุที่อยู่ห่างไกล พัลซาร์ และกาแล็กซี
เรดาร์ในอุตสาหกรรมยานยนต์
ตั้งแต่ปี 2560 MAI ได้พัฒนาการพัฒนาที่มุ่งสร้างขนาดเล็ก สถานีเรดาร์สำหรับรถยนต์ที่ขับเคลื่อนด้วยตนเอง อุปกรณ์ออนบอร์ดขนาดเล็กดังกล่าวจะสามารถติดตั้งในรถยนต์ทุกคันได้ในอนาคตอันใกล้นี้ ในปี 2018 การทดสอบเรดาร์ที่ไม่ได้มาตรฐานสำหรับยานพาหนะทางอากาศไร้คนขับกำลังดำเนินการอยู่ มีการวางแผนว่าอุปกรณ์ดังกล่าวจะสามารถระบุวัตถุภาคพื้นดินได้ในระยะไกลสูงสุด 60 กิโลเมตรและวัตถุในทะเล - สูงสุด 100 กม.
เป็นที่น่าสังเกตว่าในปี 2560 มีการนำเสนอเรดาร์ดูอัลแบนด์ขนาดเล็กในอากาศด้วย อุปกรณ์พิเศษได้รับการพัฒนาเพื่อตรวจจับวัตถุและวัตถุประเภทต่าง ๆ ภายใต้เงื่อนไขใด ๆ
อุปกรณ์ I – ตัวบ่งชี้วัตถุประสงค์:
การเล่นบนหน้าจอ ข้อมูลเบื้องต้นเกี่ยวกับสภาพแวดล้อมที่มาจากอุปกรณ์เรดาร์
การกำหนดพิกัดของวัตถุพื้นผิวและแก้ไขปัญหาการนำทางแบบกราฟิก
การซิงโครไนซ์และการควบคุมโหมดการทำงานของสถานี
การก่อตัวของพัลส์ทริกเกอร์สำหรับอุปกรณ์ส่งสัญญาณ
สร้างแรงกระตุ้นเพื่อสตาร์ทอุปกรณ์เสริม
การก่อตัวของพัลส์สัญญาณทิศทางสำหรับอุปกรณ์เสริม
การจัดหาแหล่งจ่ายไฟอัตโนมัติสำหรับหน่วยและอุปกรณ์ของคุณเอง
การออกแบบและหลักการทำงาน:
อุปกรณ์ I ประกอบด้วยเส้นทางและโหนดต่อไปนี้:
เส้นทางการซิงโครไนซ์เวลา
เส้นทางฐานเวลา
เส้นทางของอุปกรณ์เล็งและเครื่องหมายระยะ
เส้นทางค้นหาทิศทาง
เส้นทางการป้อนข้อมูล
เส้นทางโหมดการเคลื่อนไหวที่แท้จริง
จอแสดงผลดิจิตอลของช่วงและทิศทาง
หลอดรังสีแคโทดและระบบโก่งตัว
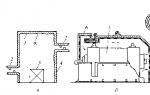
หลักการทำงานของอุปกรณ์ มาดูกันดีกว่า แผนภาพโครงสร้าง(รูปที่ 1)
เส้นทางการซิงโครไนซ์เวลามีออสซิลเลเตอร์หลัก (3G) ซึ่งสร้างพัลส์หลักด้วยอัตราการเกิดซ้ำ 3000 พัลส์/วินาที สำหรับช่วงสเกล 1 และ 2 ไมล์ 1,500 พัลส์/วินาที – สำหรับ 4 และ 8 ไมล์; 750 พัลส์/วินาที – สำหรับเครื่องชั่งน้ำหนัก 16 และ 32 ไมล์; 500 Imp/วินาที สำหรับระยะทาง 64 ไมล์ พัลส์หลักจาก 3G จะถูกส่งไปยังเอาต์พุตของอุปกรณ์เพื่อทริกเกอร์อุปกรณ์ที่เกี่ยวข้องกับการใช้งาน (ในอุปกรณ์ P-3) เพื่อเริ่มเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย (ในเส้นทางการซิงโครไนซ์เวลา)
ในทางกลับกัน พัลส์การซิงโครไนซ์รองจะได้รับจากอุปกรณ์ P-3 เข้าสู่เส้นทางการซิงโครไนซ์ของอุปกรณ์ ซึ่งการเริ่มต้นของการกวาดในช่วงและทิศทางจะซิงโครไนซ์กับการเริ่มต้นการปล่อยพัลส์การตรวจสอบโดยอุปกรณ์ A (เสาอากาศเรดาร์) และเส้นทางของอุปกรณ์เล็งและเครื่องหมายระยะจะถูกเปิดตัว
เส้นทางกวาดเวลาโดยใช้เครื่องกำเนิดการสแกนจะสร้างและสร้างแรงดันไฟฟ้าแบบฟันเลื่อย ซึ่งหลังจากการแปลงชุดหนึ่งจะถูกส่งไปยังระบบการโก่งตัวของการเคลื่อนที่สัมพัทธ์ในหลอดรังสีแคโทดและไปยังเส้นทางค้นหาทิศทาง
เส้นทางของอุปกรณ์เล็งและเครื่องหมายกำหนดระยะได้รับการออกแบบเพื่อสร้างเรนจ์ไฟนเดอร์แบบเคลื่อนที่ (MRF) ซึ่งรับประกันการมองเห็นวัตถุในระยะ และการวัดระยะจะดำเนินการโดยตัวนับดิจิตอลอิเล็กทรอนิกส์ ข้อมูลเกี่ยวกับช่วงจะแสดงบนจอแสดงผลดิจิตอล TsT-3
โรเตอร์ของหม้อแปลงหมุนของเครื่องกำเนิดการสแกนจะหมุนพร้อมกันและอยู่ในเฟสกับเสาอากาศซึ่งช่วยให้มั่นใจได้ว่าเครื่องสแกนและเสาอากาศจะหมุนแบบซิงโครนัสรวมถึงการได้รับเครื่องหมายสำหรับการเริ่มต้นการสแกน ณ เวลาสูงสุดของเสาอากาศ รูปแบบการแผ่รังสีตัดผ่านระนาบกึ่งกลางของเรือ
เส้นทางช่องมองภาพทิศทางประกอบด้วยเซ็นเซอร์มุม เครื่องกำเนิดสัญญาณที่อ่านและถอดรหัส และหม้อแปลงหมุนสำหรับสแกนช่องมองภาพทิศทาง มุมการหมุนของหม้อแปลงหมุนที่สร้างขึ้นในเส้นทางค้นหาทิศทางซึ่งเกิดขึ้นในรูปแบบของสัญญาณที่เข้ารหัสหลังจากถอดรหัสจะถูกส่งไปยังบอร์ดแสดงผลดิจิทัล TsT-4
เส้นทางอินพุตข้อมูลได้รับการออกแบบมาเพื่อป้อนข้อมูลเกี่ยวกับช่วงและทิศทางของวัตถุไปยัง CRT รวมถึงแสดงสัญญาณวิดีโอที่มาจากอุปกรณ์ P-3 บน CRT
เส้นทางโหมดการเคลื่อนไหวที่แท้จริงได้รับการออกแบบมาเพื่อป้อนข้อมูลด้วยความเร็ว V s - จากบันทึก, หลักสูตร K s จากไจโรคอมพาส ซึ่งใช้ในการสร้างส่วนประกอบของเวกเตอร์ความเร็วบนสเกลในทิศทาง N - S และ E - ว; เพื่อให้แน่ใจว่าการเคลื่อนที่ของเครื่องหมายของเรือของตัวเองบนหน้าจอ CRT ตามมาตราส่วนที่เลือก เส้นทางยังจัดให้มีการคืนเครื่องหมายของเรือของตัวเองไปยังจุดเริ่มต้นโดยอัตโนมัติและด้วยตนเอง
อุปกรณ์ P-3 – ตัวรับส่งสัญญาณวัตถุประสงค์:
อุปกรณ์ P-3 (ตัวรับส่งสัญญาณ) มีไว้สำหรับ:
การก่อตัวและการเกิดพัลส์โพรบไมโครเวฟ
การรับ การขยาย และการแปลงสัญญาณเรดาร์ที่สะท้อนกลับเป็นสัญญาณวิดีโอ
รับประกันการทำงานแบบซิงโครนัสและในเฟสตามเวลาของบล็อกและหน่วยอุปกรณ์ทั้งหมด: I; ป – 3; ก.
องค์ประกอบอุปกรณ์:
· หน่วยไมโครเวฟ – 3 (หน่วยความถี่สูงพิเศษ)
· บล็อก MP (โมดูเลเตอร์ส่งสัญญาณ)
· บล็อก FM (ตัวกรองโมดูเลเตอร์)
· หน่วย AFC (หน่วยปรับความถี่อัตโนมัติ)
· บล็อก UR (เครื่องขยายสัญญาณแบบปรับได้)
· บล็อก UG (เครื่องขยายสัญญาณหลัก)
· หน่วย NK – 3 (หน่วยปรับและควบคุม)
· หน่วย ACS (ชุดควบคุมเสถียรภาพและควบคุมอัตโนมัติ)
· หน่วยย่อย FS (อดีตพัลส์นาฬิกา)
· อุปกรณ์เรียงกระแส 4 ชิ้นจ่ายไฟให้กับบล็อกและวงจรของอุปกรณ์ P – 3
ลองดูการทำงานของอุปกรณ์ในแผนภาพบล็อก

เส้นทางการสร้างสัญญาณการสั่นไหวได้รับการออกแบบเพื่อสร้างพัลส์การซิงโครไนซ์รองที่เข้าสู่อุปกรณ์ และยังเพื่อทริกเกอร์โมดูเลเตอร์ของเครื่องส่งสัญญาณผ่านหน่วยควบคุมเสถียรภาพอัตโนมัติ ด้วยความช่วยเหลือของพัลส์การซิงโครไนซ์เหล่านี้ ทำให้มั่นใจได้ว่าการซิงโครไนซ์ของพัลส์การตรวจวัดกับการเริ่มต้นการสแกนบน CRT ของอุปกรณ์ I จะเป็นไปอย่างมั่นใจ
เส้นทางการสร้างพัลส์ที่ตรวจวัดได้รับการออกแบบเพื่อสร้างพัลส์ไมโครเวฟและส่งไปตามท่อนำคลื่นไปยังอุปกรณ์ A สิ่งนี้เกิดขึ้นหลังจากที่โมดูเลเตอร์แรงดันไฟฟ้าสร้างการมอดูเลตพัลส์ของเครื่องกำเนิดไมโครเวฟ เช่นเดียวกับพัลส์ควบคุมและการซิงโครไนซ์ของบล็อกและโหนดที่ผสมพันธุ์
เส้นทางการสร้างสัญญาณวิดีโอได้รับการออกแบบมาเพื่อแปลงพัลส์ไมโครเวฟที่สะท้อนกลับเป็นพัลส์ความถี่กลางโดยใช้ออสซิลเลเตอร์และมิกเซอร์เฉพาะที่ สร้างและขยายสัญญาณวิดีโอซึ่งจากนั้นจะเข้าสู่อุปกรณ์ I ท่อนำคลื่นทั่วไปใช้ในการส่งพัลส์การตรวจสอบไปยังอุปกรณ์ A และพัลส์ที่สะท้อนกลับ ไปยังเส้นทางการสร้างสัญญาณวิดีโอ
เส้นทางการควบคุมและการปรับแหล่งจ่ายไฟได้รับการออกแบบเพื่อสร้างแรงดันไฟฟ้าของแหล่งจ่ายไฟสำหรับบล็อกและวงจรทั้งหมดของอุปกรณ์ เช่นเดียวกับการตรวจสอบประสิทธิภาพของแหล่งจ่ายไฟ บล็อกการทำงานและส่วนประกอบของสถานี แมกนีตรอน ออสซิลเลเตอร์เฉพาะที่ ช่องประกายไฟ ฯลฯ
อุปกรณ์ A เป็นอุปกรณ์เสาอากาศวัตถุประสงค์:
อุปกรณ์ A ได้รับการออกแบบมาเพื่อปล่อยและรับพัลส์พลังงานไมโครเวฟและข้อมูลเอาท์พุตที่มุมส่วนหัวของเสาอากาศและเครื่องหมายทิศทางไปยังอุปกรณ์ I เป็นเสาอากาศแบบช่องแตร
ข้อมูลพื้นฐานของอุปกรณ์ A
ความกว้างของลำแสง:
ในระนาบแนวนอน – 0.7° ± 0.1
ในระนาบแนวตั้ง - 20° ± 0.1
ความถี่ในการหมุนเสาอากาศ 19 ± 4 รอบต่อนาที
อุณหภูมิในการทำงานอยู่ระหว่าง - 40°C ถึง + 65°C
ขนาด:
ความยาว – 833 มม
ความกว้าง – 3427 มม
ความสูง – 554 มม
น้ำหนัก – 104 กก.
โครงสร้างอุปกรณ์ทำในรูปแบบของบล็อกที่ถอดออกได้ 2 อัน
บล็อก PA – ส่วนที่หมุนของเสาอากาศ
บล็อก AR - ดำเนินการ: การก่อตัวของพลังงานไมโครเวฟในรูปแบบของลำแสงวิทยุที่มีรูปร่างที่ต้องการ กำกับการแผ่รังสีพลังงานสู่อวกาศและการรับสัญญาณโดยตรงหลังจากการสะท้อนจากวัตถุที่ถูกฉายรังสี
การทำงานของอุปกรณ์ A
มีการติดตั้งมอเตอร์ไฟฟ้าพร้อมกระปุกเกียร์ไว้ในบล็อก PA ของอุปกรณ์ มอเตอร์ไฟฟ้าขับเคลื่อนจากเครือข่ายของเรือและรับประกันการหมุนเป็นวงกลมของบล็อก AR ของอุปกรณ์ A มอเตอร์ไฟฟ้ายังหมุนโรเตอร์ของหม้อแปลงที่กำลังหมุนจากอุปกรณ์ที่ฉันได้รับผ่านระบบติดตามผ่านกระปุกเกียร์ด้วย เกี่ยวกับตำแหน่งเชิงมุมของเสาอากาศที่สัมพันธ์กับ DP ของเรือ (มุมที่มุ่งหน้าไป) และสัญญาณที่มุ่งหน้าไปของเรือด้วย นอกจากนี้ บล็อก PA ยังมีทางแยกไมโครเวฟแบบหมุน ซึ่งออกแบบมาเพื่อเชื่อมต่อตัวปล่อยแบบหมุน (บล็อก AR) กับเส้นทางท่อนำคลื่นที่อยู่กับที่
ยูนิต AR ซึ่งเป็นเสาอากาศแบบสล็อต จะสร้างลำแสงวิทยุตามทิศทางตามรูปร่างที่ต้องการ ลำแสงวิทยุปล่อยพลังงานไมโครเวฟออกสู่อวกาศและให้การรับทิศทางของพลังงานไมโครเวฟส่วนหนึ่งที่สะท้อนจากวัตถุที่ถูกฉายรังสี สัญญาณที่สะท้อนจะเข้าสู่อุปกรณ์ P-3 ผ่านท่อนำคลื่นทั่วไป ซึ่งหลังจากการแปลงหลายครั้ง สัญญาณดังกล่าวจะกลายเป็นสัญญาณวิดีโอ
บล็อก PA ยังมีเครื่องทำความร้อนไฟฟ้าความร้อน (TEH) ซึ่งได้รับการออกแบบมาเพื่อป้องกันอันตรายจากการแข็งตัวของชิ้นส่วนที่เคลื่อนไหวของอุปกรณ์ A และตัวกรองเพื่อกำจัดสัญญาณรบกวนทางวิทยุทางอุตสาหกรรม
อุปกรณ์ KU เป็นอุปกรณ์คอนแทคเตอร์วัตถุประสงค์:
อุปกรณ์ KU (อุปกรณ์คอนแทคเตอร์) ได้รับการออกแบบมาเพื่อเชื่อมต่อเรดาร์กับเครือข่ายออนบอร์ด, สลับแรงดันเอาต์พุตของชุดเครื่อง, ป้องกันไดรฟ์เสาอากาศจากการโอเวอร์โหลดและป้องกันเรดาร์ในกรณีที่มีการละเมิดคำสั่งปิดเครื่อง พร้อมทั้งปกป้องสถานีในกรณีที่มีการปิดระบบเครือข่ายออนบอร์ดฉุกเฉิน
อุปกรณ์จ่ายแรงดันไฟฟ้า AC 220V ที่ความถี่ 400 Hz ไปยังอุปกรณ์เรดาร์ 3 ÷ 6 วินาทีหลังจากเปิดเครื่อง
ในกรณีที่เครือข่ายออนบอร์ดปิดฉุกเฉิน อุปกรณ์จะปิดผู้ใช้บริการภายใน 0.4 ÷ 0.5 วินาที
อุปกรณ์จะปิดไดรฟ์เสาอากาศหลังจาก 5 ÷ 20 วินาที ในกรณีที่การหมุนเฟสไม่ถูกต้อง ในกรณีที่เฟสใดเฟสหนึ่งขาด และในกรณีที่กระแสโหลดของไดรฟ์เสาอากาศเพิ่มขึ้น
ตัวแปลงทั้งหมด – 1.5ม.วัตถุประสงค์:
ตัวแปลงถูกออกแบบมาเพื่อแปลงกระแสสามเฟสที่มีความถี่ 50 Hz เป็นเฟสเดียว เครื่องปรับอากาศแรงดันไฟฟ้า 220 โวลต์ ความถี่ 427 เฮิร์ตซ์ เป็นหน่วยเครื่องจักรบนเพลาซึ่งมีมอเตอร์ซิงโครนัสสามเฟสและเครื่องกำเนิดไฟฟ้าซิงโครนัสเฟสเดียว
ตัวแปลงช่วยให้สามารถสตาร์ทและหยุดหน่วยจ่ายไฟในพื้นที่และระยะไกลได้
การจัดการการดำเนินงานเรดาร์
การทำงานของเรดาร์จะถูกควบคุมจากแผงควบคุมและแผงควบคุมของอุปกรณ์ I
การควบคุมแบ่งออกเป็น ปฏิบัติการและเสริม.
โดยการใช้ การดำเนินงานการควบคุม:
สถานีเปิดและปิด (27)
สวิตช์ช่วงสเกล (14)
ระยะทางถึงเป้าหมายวัดโดยใช้เรนจ์ไฟนเดอร์ (15)
มุมที่มุ่งหน้าไปและทิศทางของเป้าหมายถูกกำหนดโดยใช้เครื่องค้นหาทิศทางแบบอิเล็กทรอนิกส์และเชิงกล (28), (29)
การทำเครื่องหมายหลักสูตรถูกปิดใช้งาน (7)
ควบคุมความโดดเด่น (การขยาย) ของสัญญาณเรดาร์และการป้องกันเสียงรบกวน (8, 9, 10, 11, 12, 13)
ปรับความสว่างของแบ็คไลท์ของแผงและสเกลแล้ว (2)
โดยการใช้ เสริมการควบคุม:
การหมุนเสาอากาศเปิดและปิด (26)
การเชื่อมต่อระหว่างตัวบ่งชี้และบันทึกและไจโรคอมพาสเปิดอยู่
การอ่านค่าสเกลการเคลื่อนที่ของช่องมองภาพทิศทางเป็นไปตามที่ตกลงกัน (29)
ความสว่างของการกวาดและเครื่องหมายสนามสามารถปรับได้ (22, 23)
AFC ถูกปิดและโหมดแมนนวลสำหรับการปรับความถี่ออสซิลเลเตอร์ท้องถิ่นเปิดอยู่ (27)
จุดศูนย์กลางการหมุนของเครื่องสแกนอยู่ในแนวเดียวกับจุดศูนย์กลางทางเรขาคณิตของตัวค้นหาทิศทาง (20)
มีการปรับออสซิลเลเตอร์ภายในของอุปกรณ์ P-3
โหมดสำหรับตรวจสอบประสิทธิภาพโดยรวมของเรดาร์เปิดอยู่ (16, 17, 18, 19)
แหล่งจ่ายไฟสำหรับโมดูเลเตอร์ของอุปกรณ์ P-3 ปิดอยู่
ตั้งค่าความสว่างของหน้าจอ CRT และลำแสงถูกโฟกัส
ตัวหมุนเสาอากาศเปิดอยู่ (26)
การทำความร้อนด้วยเสาอากาศเปิดอยู่ในอุปกรณ์ KU
ตำแหน่งของตัวควบคุมบนรีโมทคอนโทรลและแผงไฟแสดงสถานะจะแสดงในรูป
 รูปที่ 3 แผงควบคุมสำหรับตัวบ่งชี้เรดาร์ Naiad-5:
รูปที่ 3 แผงควบคุมสำหรับตัวบ่งชี้เรดาร์ Naiad-5:
1- "สเกลไฟส่องสว่าง"; 2-“แผงแบ็คไลท์”; 3- "องศา"; 4- "สเกล - ช่วงเวลา"; 5- "ไมล์"; 6-“PZ”; 7-“เครื่องหมายหลักสูตร”; 8- "ฝน"; 9-“ความสว่าง VN”; 10-“ความสว่าง VD”; 11-“ MD ความสว่าง”; 12- "คลื่น"; 13-“เสริมสร้างความเข้มแข็ง”; 14- "สวิตช์มาตราส่วนช่วง"; 15- "พิสัย"; 16- "บล็อก"; 17- "วงจรเรียงกระแส"; 18- "การควบคุม"; 19- "ตัวบ่งชี้ตัวชี้"; 20- "ตั้งศูนย์กลาง"; 21-“ปิด RFC”; 22-“ความสว่างตกลง”; 23-“ความสว่างในการสแกน”; 24-“สัญญาณเท็จ”; 25- "การควบคุมเรดาร์"; 26- “เสาอากาศ – ปิด”; 27- "ปิดเรดาร์"; 28-“ สายตากล”; 29-“ทิศทาง”; 30- "หลักสูตร-เหนือ-เหนือ-ID"; 31-“รีเซ็ตไปที่กึ่งกลาง”; 32-“รีเซ็ต”; 33-“กะกึ่งกลาง”; 34-“ การบัญชีสำหรับการรื้อถอน”; 35- "ความเร็วด้วยตนเอง"
การบำรุงรักษาเรดาร์
ก่อนที่จะเปิดเรดาร์ คุณต้อง:
ผลิต การตรวจสอบภายนอกและตรวจสอบให้แน่ใจว่าไม่มีความเสียหายภายนอกต่ออุปกรณ์และเครื่อง
ตั้งค่าการควบคุมไปยังตำแหน่งที่แสดงในตาราง
| ชื่อหน่วยงานกำกับดูแล | ตำแหน่งการควบคุมก่อนเปิดไฟแสดง |
| สลับสวิตช์ "เรดาร์ - ปิด" | ปุ่ม “Rain” ปุ่ม “ความสว่าง VN” ปุ่ม “ความสว่าง VD” ปุ่ม “ความสว่าง MD” ปุ่ม “Wave” ปุ่ม “Gain” ปุ่ม “ความสว่างของสเกล” ปุ่ม “Sweep ความสว่าง ตกลง” ปุ่มสวิตช์ “หลักสูตร – ทิศเหนือ – ทิศเหนือ ID” ปุ่มสวิตช์ “ รีเซ็ตไปที่กึ่งกลาง" หน่วยงานกำกับดูแล "การเปลี่ยนศูนย์" หน่วยงานกำกับดูแล "คำนึงถึงการดริฟท์: ความเร็ว, ทิศทาง" ตัวควบคุม "ความเร็วด้วยตนเอง" ปุ่ม "สัญญาณเท็จ" สวิตช์สลับ "Gyrocompass - ปิด" |
สลับสวิตช์ "เสาอากาศ - ปิด"
"ปิด" ค่าเฉลี่ยกลางซ้ายสุด ค่าเฉลี่ยกลางซ้ายสุด โรงงานคงที่ "หลักสูตร" เปิดใช้งาน ค่าเฉลี่ย 0 ในระดับดิจิทัล 0 ในระดับดิจิทัล เปิดใช้งาน "ปิด"
"ปิด"
ส่วนควบคุมที่เหลือสามารถคงอยู่ในตำแหน่งใดก็ได้
กำลังเปิดสถานี
สวิตช์จ่ายไฟออนบอร์ดถูกตั้งไว้ที่ตำแหน่ง "เปิด" (หน่วยจ่ายไฟเริ่มทำงาน)
บนตัวบ่งชี้:
สวิตช์ "เรดาร์ - ปิด" ตั้งไว้ที่ตำแหน่งเรดาร์
สลับสวิตช์ "เสาอากาศ - ปิด" ตั้งค่าไปที่ตำแหน่งเสาอากาศ
เปิดปุ่มการทำงาน P - 3 (กลไกมาตราส่วนและคำจารึกอธิบายควรสว่างขึ้น)
หลังจาก 1.5 สีน้ำตาล 2.5 นาที หน้าจอ CRT ควรแสดงการสแกนแบบหมุน เครื่องหมายมุ่งหน้า เครื่องหมายช่วง และเส้นมุ่งหน้า
หลังจากผ่านไป 4 นาที เครื่องหมายของชีพจรที่ตรวจวัดและเครื่องหมายของวัตถุในพื้นที่ดูเรดาร์ควรปรากฏขึ้น
ใช้ตัวควบคุมที่เหมาะสม เลือกความสว่างที่เหมาะสมที่สุดของ HV วีดี; นพ.; และตำแหน่งของ “คลื่น”
ตัวรับส่งสัญญาณเปิดอยู่โดยใช้สวิตช์ปุ่มกด (6)
การวางแนวของภาพสัมพันธ์กับเส้นลมปราณที่แท้จริง (ทิศเหนือ) หรือสัมพันธ์กับระนาบศูนย์กลางของเรือ (เส้นทาง) ในโหมดการเคลื่อนไหวสัมพัทธ์จะดำเนินการโดยสวิตช์ 30 โดยการตั้งค่าไปที่ตำแหน่ง "ทิศเหนือ" หรือ "เส้นทาง" ด้วยสวิตช์เดียวกันโดยตั้งค่าไปที่ตำแหน่ง "ทิศเหนือ - ID" โหมดของการเคลื่อนไหวที่แท้จริงจะมีให้ในระดับ 1 2; 4; 8 ไมล์
ศูนย์กลางการกวาดถูกเลื่อนไปยังจุดที่เลือกโดยโพเทนชิโอมิเตอร์ (33)
จุดเริ่มต้น (กึ่งกลาง) ของการสแกนจะกลับไปที่ศูนย์กลางของ CRT ด้วยปุ่ม 31 และ 32
สามารถป้อนข้อมูลความเร็วเรือของตัวเองได้ด้วยตนเอง (35)
การแก้ไขการดริฟท์ปัจจุบันถูกป้อนโดยโพเทนชิออมิเตอร์ (35)
ตัวบ่งชี้ดิจิตอลของระยะทางที่วัดไปยังเป้าหมายและการบ่งชี้ทิศทางจะดำเนินการบนจอแสดงผลดิจิตอล TsT - 3 และ TsT - 4 (3; 5)
การตรวจสอบประสิทธิภาพของเรดาร์นั้นดำเนินการโดยระบบในตัวที่ให้การตรวจสอบประสิทธิภาพโดยรวมและการแก้ไขปัญหา (16; 17; 18; 19;)
พวกเขาเชื่อมั่นในความเป็นไปได้ของ: การควบคุมการมองเห็นของช่วงความเร็วสูงและทิศทางไฟฟ้าแรงสูง ตลอดจนการปิดเครื่องหมายส่วนหัวและการเปลี่ยนสเกลโดยการเปลี่ยนสเกลของช่วง
ตรวจสอบ: การจัดตำแหน่งจุดเริ่มต้นของการกวาดให้ตรงกับศูนย์กลางของหน้าจอ (ที่ตำแหน่งตั้งฉากกันสองตำแหน่งของตัวค้นหาทิศทางในระดับ 4 ไมล์) ความสามารถในการใช้งานของโครงร่างการวางแนวรูปภาพ (ไจโรคอมพาสถูกปิดสวิตช์ "รหัสเส้นทาง - เหนือ - เหนือ" ถูกตั้งค่าสลับกันในตำแหน่ง "เส้นทาง" และ "ทิศเหนือ" ตรวจสอบให้แน่ใจว่าเครื่องหมายของเส้นทางเปลี่ยนตำแหน่ง) หลังจากนั้นให้ตั้งสวิตช์สลับไปที่ตำแหน่ง "ไจโรคอมพาส" และตรวจสอบให้แน่ใจว่าตำแหน่งของเส้นเส้นทางสอดคล้องกับการอ่านค่าของตัวทวนแบตเตอรี่หลัก
ตรวจสอบการกระจัดของศูนย์กลางการหมุนของการสแกนในโหมด OD (ที่จับ "รีเซ็ตไปที่กึ่งกลาง" ถูกตั้งค่าไว้ที่ตำแหน่งปิด ที่จับ "การเปลี่ยนกึ่งกลาง" จะเลื่อนศูนย์กลางของการสแกนไปทางซ้ายและขวาอย่างราบรื่น 2 /3 ของรัศมีของ CRT ทั้งหมดนี้ทำที่ 1; 2; 4; 8 ไมล์เมื่อวางสลับกันไปตาม "สนาม" และ "ทิศเหนือ"
เมื่อใช้ปุ่ม "รีเซ็ตเป็นกึ่งกลาง" ฉันจะจัดตำแหน่งกึ่งกลางของการสแกนให้ตรงกับกึ่งกลางของ "หน้าจอ CRT" อีกครั้ง
พวกเขาตรวจสอบตัวบ่งชี้สำหรับการทำงานในโหมด ID เพื่อจุดประสงค์นี้: ตั้งสวิตช์ไปที่โหมด "ทิศเหนือ - ID" สเกลช่วงตั้งไว้ที่ 1 ไมล์ ปิดบันทึกและไจโรคอมพาส ปุ่ม "การบัญชีดริฟท์" ไปที่ ตำแหน่งศูนย์ ตั้งค่าความเร็วด้วยตนเองโดยใช้ปุ่ม "รีเซ็ต" ไปที่กึ่งกลาง " ตรวจสอบให้แน่ใจว่าจุดเริ่มต้นของการสแกนบนหน้าจอเคลื่อนไปตามเส้นทางด้วยความเร็วที่ตั้งไว้ เมื่อการเคลื่อนไหวถึง 2/3 ของรัศมีของ CRT ศูนย์สแกนควรกลับไปที่กึ่งกลางของหน้าจอโดยอัตโนมัติ จะต้องมั่นใจในการคืนจุดเริ่มต้นของการกวาดไปยังจุดเริ่มต้นด้วยการกดปุ่ม "รีเซ็ต" ด้วยตนเอง
ใช้ปุ่ม “ดริฟท์การบัญชี” เพื่อป้อนค่าที่กำหนดเองสำหรับการแก้ไขส่วนหัวและความเร็ว และตรวจสอบให้แน่ใจว่าการเปลี่ยนแปลงพารามิเตอร์สำหรับการเลื่อนการเริ่มต้นการสแกนบนหน้าจอ CRT
สวิตช์ “หลักสูตร - เหนือ - เหนือ ID” ถูกตั้งค่าไว้ที่ตำแหน่ง “หลักสูตร” หรือ “ทิศเหนือ” ในกรณีนี้ จุดเริ่มต้นของการกวาดควรย้ายไปที่กึ่งกลางของหน้าจอ และควรเปิดโหมด OD สิ่งเดียวกันควรเกิดขึ้นเมื่อตั้งค่าช่วงเป็น 16; 32; 64 ไมล์
ตรวจสอบการเลื่อนการเริ่มการสแกนด้วยตนเองในโหมด ID: ปิดปุ่ม "รีเซ็ตไปที่กึ่งกลาง" ตั้งค่าส่วนควบคุม "การเลื่อนกึ่งกลาง" ไปที่ตำแหน่งที่รับประกันการเลื่อนการเริ่มการสแกนในจำนวนที่น้อยกว่า 2/3 ของรัศมีของ CRT กดปุ่ม "รีเซ็ต" และตรวจสอบให้แน่ใจว่าการกวาดตรงกลางเคลื่อนไปยังจุดที่เลือก และเริ่มเคลื่อนไปยัง ทิศทางที่กำหนด- เมื่อเลื่อนรัศมีหน้าจอไป 2/3 ศูนย์การสแกนจะกลับไปยังจุดที่เลือกโดยอัตโนมัติ
ประสิทธิภาพของสถานีได้รับการตรวจสอบโดยระบบในตัวที่ให้การตรวจสอบและการแก้ไขปัญหา ระบบประกอบด้วยองค์ประกอบต่างๆ ที่รวมอยู่ในอุปกรณ์และบล็อกสถานีแยกกัน
ประสิทธิภาพของอุปกรณ์ P-3 ได้รับการตรวจสอบโดยใช้หน่วย NK-3 ที่อยู่ในนั้นซึ่งจะตรวจสอบความสามารถในการให้บริการของแหล่งจ่ายไฟและบล็อกการทำงานและชุดประกอบ
การตรวจสอบประสิทธิภาพของอุปกรณ์ I และค้นหาแหล่งจ่ายไฟหรือหน่วยการทำงานที่ผิดพลาดนั้นดำเนินการโดยใช้ชุดควบคุมในตัวที่อยู่บนแผงควบคุมของอุปกรณ์ I
สถานีปิดอยู่:
· การถอดอุปกรณ์จ่ายไฟโดยใช้สวิตช์สลับ “ปิดเรดาร์”
· การตัดการเชื่อมต่อแรงดันไฟฟ้าเครือข่ายออนบอร์ด (ปุ่มสตาร์ท "หยุด")
· ตัดการเชื่อมต่อแรงดันไฟฟ้าจากองค์ประกอบการสื่อสารด้วยบันทึกและไจโรคอมพาส
สถานีเรดาร์
คำขอ "เรดาร์" ถูกเปลี่ยนเส้นทางที่นี่ เกี่ยวกับการลงทะเบียน ยาดูทะเบียนยา
สถานีเรดาร์(เรดาร์) หรือ เรดาร์(ภาษาอังกฤษ) เรดาร์จาก ร.อ.ดิโอ ดีการเลือกตั้ง ก nd รตกปลา- การตรวจจับด้วยคลื่นวิทยุและการกำหนดระยะ) - ระบบสำหรับตรวจจับวัตถุในอากาศ ทะเล และพื้นดิน รวมถึงการกำหนดระยะ ความเร็ว และพารามิเตอร์ทางเรขาคณิต ใช้วิธีการตามการปล่อยคลื่นวิทยุและบันทึกการสะท้อนจากวัตถุ คำย่อภาษาอังกฤษปรากฏในปี พ.ศ. 2484 ต่อมาในงานเขียนอักษรตัวใหญ่ถูกแทนที่ด้วยตัวพิมพ์เล็ก
เรื่องราว
ในสหภาพโซเวียตและรัสเซีย
ในสหภาพโซเวียต การตระหนักรู้ถึงความจำเป็นในการตรวจจับเครื่องบินหมายถึงการปราศจากข้อเสียของการเฝ้าระวังด้านเสียงและการมองเห็น ซึ่งนำไปสู่การพัฒนาการวิจัยในสาขาเรดาร์ แนวคิดที่เสนอโดยปืนใหญ่หนุ่ม Pavel Oshchepkov ได้รับการอนุมัติจากผู้บังคับบัญชาระดับสูง: ผู้บังคับการกระทรวงกลาโหมของสหภาพโซเวียต K. E. Voroshilov และรองผู้อำนวยการของเขา M. N. Tukhachevsky
ในปี 1946 ผู้เชี่ยวชาญชาวอเมริกัน - Raymond และ Hacherton อดีตพนักงานสถานทูตสหรัฐฯ ในมอสโกเขียนว่า “นักวิทยาศาสตร์โซเวียตประสบความสำเร็จในการพัฒนาทฤษฎีเรดาร์เป็นเวลาหลายปีก่อนที่จะมีการประดิษฐ์เรดาร์ในอังกฤษ”
การจำแนกประเภท
ตามขอบเขตการใช้งานจะแยกแยะได้- ทหาร;
- พลเรือน;
- เรดาร์ตรวจจับ
- เรดาร์ควบคุมและติดตาม
- เรดาร์แบบพาโนรามา;
- เรดาร์มองข้าง;
- เรดาร์อุตุนิยมวิทยา
- เรดาร์กำหนดเป้าหมาย
- เรดาร์ตรวจการณ์สถานการณ์
- เรดาร์ชายฝั่ง
- เรดาร์กองทัพเรือ
- เรดาร์ทางอากาศ
- เรดาร์เคลื่อนที่
- ประถมศึกษาหรือเฉยๆ
- รองหรือใช้งานอยู่
- รวม
- เรดาร์เหนือขอบฟ้า
- เมตร
- เดซิเมตร
- เซนติเมตร
- มิลลิเมตร
การออกแบบและหลักการทำงานของเรดาร์ปฐมภูมิ
เรดาร์ปฐมภูมิ (พาสซีฟ) ทำหน้าที่ตรวจจับเป้าหมายเป็นหลักโดยการส่องสว่างเป้าหมายด้วยคลื่นแม่เหล็กไฟฟ้า จากนั้นรับการสะท้อน (เสียงสะท้อน) ของคลื่นนี้จากเป้าหมาย เพราะความเร็ว คลื่นแม่เหล็กไฟฟ้าค่าคงที่ (ความเร็วแสง) ทำให้สามารถกำหนดระยะห่างไปยังเป้าหมายโดยอาศัยการวัดพารามิเตอร์การแพร่กระจายสัญญาณต่างๆ
สถานีเรดาร์ประกอบด้วยองค์ประกอบ 3 ส่วน ได้แก่ เครื่องส่ง เสาอากาศ และตัวรับสัญญาณ
เครื่องส่ง(อุปกรณ์ส่งสัญญาณ) เป็นแหล่งสัญญาณแม่เหล็กไฟฟ้ากำลังสูง อาจเป็นเครื่องกำเนิดพัลส์ที่ทรงพลัง สำหรับเรดาร์พัลส์เซ็นติเมตร โดยปกติจะเป็นแมกนีตรอนหรือเครื่องกำเนิดพัลส์ที่ทำงานตามรูปแบบต่อไปนี้: ออสซิลเลเตอร์หลักคือแอมพลิฟายเออร์ที่ทรงพลัง ซึ่งส่วนใหญ่มักจะใช้โคมไฟคลื่นเคลื่อนที่เป็นเครื่องกำเนิด และสำหรับเรดาร์ตรวจวัดระยะเมตร หลอดไตรโอดคือ มักใช้ เครื่องส่งทำงานในโหมดพัลส์ โดยสร้างพัลส์แม่เหล็กไฟฟ้าสั้นๆ ที่ทรงพลังซ้ำๆ หรือปล่อยสัญญาณแม่เหล็กไฟฟ้าต่อเนื่อง ทั้งนี้ขึ้นอยู่กับการออกแบบ
เสาอากาศทำการโฟกัสสัญญาณเครื่องส่งและการก่อตัวของรูปแบบรังสีรวมถึงการรับสัญญาณที่สะท้อนจากเป้าหมายและส่งสัญญาณนี้ไปยังเครื่องรับ สัญญาณที่สะท้อนสามารถรับได้จากเสาอากาศเดียวกันหรือเสาอากาศอื่น ซึ่งบางครั้งอาจอยู่ห่างจากอุปกรณ์ส่งสัญญาณมากพอสมควร ทั้งนี้ขึ้นอยู่กับการใช้งาน หากการส่งและรับรวมอยู่ในเสาอากาศเดียว การกระทำทั้งสองนี้จะดำเนินการสลับกัน และเพื่อให้สัญญาณที่ทรงพลังที่รั่วจากเครื่องส่งสัญญาณที่ส่งไปยังเครื่องรับไม่ทำให้ผู้รับมีเสียงสะท้อนที่อ่อนแอตาบอด อุปกรณ์พิเศษจึงถูกวางไว้ด้านหน้า เครื่องรับโดยปิดอินพุตของเครื่องรับในขณะที่ปล่อยสัญญาณการตรวจสอบ
ผู้รับ (อุปกรณ์รับ) ดำเนินการขยายและประมวลผลสัญญาณที่ได้รับ ในตัวมาก กรณีง่ายๆสัญญาณผลลัพธ์จะถูกส่งไปยังท่อลำแสง (หน้าจอ) ซึ่งจะแสดงภาพที่ซิงโครไนซ์กับการเคลื่อนที่ของเสาอากาศ
เรดาร์ที่แตกต่างกันจะขึ้นอยู่กับวิธีการวัดสัญญาณที่สะท้อนที่แตกต่างกัน:
วิธีความถี่
วิธีการวัดช่วงความถี่ขึ้นอยู่กับการใช้การปรับความถี่ของสัญญาณต่อเนื่องที่ปล่อยออกมา ในวิธีนี้ ความถี่จะถูกปล่อยออกมาในช่วงเวลาที่แตกต่างกันเชิงเส้นตั้งแต่ f1 ถึง f2 สัญญาณที่สะท้อนจะมาถึงมอดูเลตเชิงเส้น ณ เวลาก่อนหน้าปัจจุบันตามเวลาหน่วง ที่. ความถี่ของสัญญาณสะท้อนที่ได้รับที่เรดาร์จะขึ้นอยู่กับเวลาตามสัดส่วน เวลาหน่วงเวลาถูกกำหนดโดยการเปลี่ยนแปลงความถี่ของสัญญาณความแตกต่างอย่างรวดเร็ว
ข้อดี:
- ช่วยให้คุณสามารถวัดช่วงที่สั้นมาก
- ใช้เครื่องส่งสัญญาณพลังงานต่ำ
ข้อบกพร่อง:
- ต้องใช้เสาอากาศสองตัว
- การเสื่อมสภาพของความไวของเครื่องรับเนื่องจากการรั่วไหลผ่านเสาอากาศเข้าสู่เส้นทางรับของการแผ่รังสีของเครื่องส่งสัญญาณอาจมีการเปลี่ยนแปลงแบบสุ่ม
- ข้อกำหนดสูงสำหรับความเป็นเส้นตรงของการเปลี่ยนแปลงความถี่
นี่คือข้อเสียเปรียบหลัก
วิธีเฟส
วิธีเรดาร์แบบเฟส (สอดคล้องกัน) ขึ้นอยู่กับการแยกและวิเคราะห์ความแตกต่างของเฟสระหว่างสัญญาณที่ส่งและสัญญาณสะท้อน ซึ่งเกิดขึ้นเนื่องจากเอฟเฟกต์ดอปเปลอร์เมื่อสัญญาณสะท้อนจากวัตถุที่กำลังเคลื่อนที่ ในกรณีนี้อุปกรณ์ส่งสัญญาณสามารถทำงานได้ทั้งแบบต่อเนื่องและในโหมดพัลส์ ข้อได้เปรียบหลักของวิธีนี้คือ “ช่วยให้คุณสังเกตได้เฉพาะวัตถุที่เคลื่อนไหว และช่วยขจัดการรบกวนจากวัตถุที่อยู่นิ่งซึ่งอยู่ระหว่างอุปกรณ์รับสัญญาณกับเป้าหมายหรือด้านหลัง”
เนื่องจากมีการใช้คลื่นที่สั้นเกินขีด ช่วงการวัดที่ชัดเจนจึงอยู่ในลำดับหลายเมตร ดังนั้นในทางปฏิบัติจึงมีการใช้วงจรที่ซับซ้อนมากขึ้นซึ่งมีความถี่ตั้งแต่สองความถี่ขึ้นไป
ข้อดี:
- การแผ่รังสีพลังงานต่ำ เมื่อมีการสร้างการแกว่งที่ไม่ทำให้หมาด ๆ
- ความแม่นยำไม่ได้ขึ้นอยู่กับการเปลี่ยนความถี่ดอปเปลอร์ของการสะท้อน
- อุปกรณ์ค่อนข้างง่าย
ข้อบกพร่อง:
- ขาดความละเอียดช่วง
- การเสื่อมสภาพของความไวของตัวรับสัญญาณเนื่องจากการแทรกซึมของรังสีของเครื่องส่งสัญญาณผ่านเสาอากาศไปยังเส้นทางการรับอาจมีการเปลี่ยนแปลงแบบสุ่ม
วิธีชีพจร
เรดาร์ติดตามสมัยใหม่ถูกสร้างขึ้นเป็นเรดาร์พัลส์ เรดาร์พัลส์ส่งสัญญาณส่งในช่วงเวลาสั้น ๆ เท่านั้น โดยเป็นพัลส์สั้น ๆ (ปกติประมาณหนึ่งไมโครวินาที) หลังจากนั้นจะเข้าสู่โหมดรับและฟังเสียงสะท้อนที่สะท้อนจากเป้าหมายในขณะที่พัลส์ที่แผ่รังสีแพร่กระจายผ่านอวกาศ
เนื่องจากพัลส์เดินทางไกลจากเรดาร์ด้วยความเร็วคงที่ เวลาที่ผ่านไปนับจากช่วงเวลาที่พัลส์ถูกส่งไปจนกระทั่งได้รับการตอบสนองของเสียงสะท้อนนั้นจะขึ้นอยู่กับระยะห่างจากเป้าหมายโดยตรง พัลส์ถัดไปสามารถส่งได้หลังจากผ่านไประยะหนึ่งเท่านั้น กล่าวคือ หลังจากที่พัลส์กลับมา (ขึ้นอยู่กับระยะการตรวจจับเรดาร์ กำลังของเครื่องส่งสัญญาณ อัตราขยายของเสาอากาศ ความไวของตัวรับสัญญาณ) หากส่งพัลส์ก่อนหน้านี้ เสียงสะท้อนของพัลส์ก่อนหน้าจากเป้าหมายระยะไกลอาจสับสนกับเสียงสะท้อนของพัลส์ที่สองจากเป้าหมายปิด
เรียกว่าช่วงเวลาระหว่างพัลส์ ช่วงเวลาการทำซ้ำของชีพจรส่วนกลับของมันคือพารามิเตอร์สำคัญที่เรียกว่า อัตราการทำซ้ำของพัลส์(ดัชนีราคาผู้บริโภค) เรดาร์ความถี่ต่ำระยะไกลมักจะมีช่วงการทำซ้ำหลายร้อยพัลส์ต่อวินาที อัตราการเกิดซ้ำของพัลส์เป็นหนึ่งในคุณสมบัติที่โดดเด่นที่ทำให้สามารถกำหนดแบบจำลองเรดาร์จากระยะไกลได้
ข้อดีของวิธีการวัดช่วงพัลส์:
- ความสามารถในการสร้างเรดาร์ด้วยเสาอากาศเดียว
- ความเรียบง่ายของอุปกรณ์ตัวบ่งชี้
- ความสะดวกในการวัดช่วงของเป้าหมายต่างๆ
- ความเรียบง่ายของพัลส์ที่ปล่อยออกมา เป็นระยะเวลาสั้นมาก และรับสัญญาณได้
ข้อบกพร่อง:
- ความจำเป็นในการใช้พลังพัลส์ของเครื่องส่งสัญญาณสูง
- ไม่สามารถวัดช่วงสั้นได้
- เขตมรณะขนาดใหญ่
การกำจัดการรบกวนแบบพาสซีฟ
ปัญหาหลักประการหนึ่งของเรดาร์พัลซิ่งคือการกำจัดสัญญาณที่สะท้อนจากวัตถุที่อยู่นิ่ง: พื้นผิวโลกเนินเขาสูง เป็นต้น เช่น หากเครื่องบินวางพิงเนินเขาสูง สัญญาณที่สะท้อนจากเนินเขานี้จะปิดกั้นสัญญาณจากเครื่องบินได้อย่างสมบูรณ์ สำหรับเรดาร์ภาคพื้นดิน ปัญหานี้เกิดขึ้นเมื่อทำงานกับวัตถุที่บินต่ำ สำหรับเรดาร์พัลส์ในอากาศ จะแสดงความจริงที่ว่าการสะท้อนจากพื้นผิวโลกบดบังวัตถุทั้งหมดที่อยู่ด้านล่างเครื่องบินด้วยเรดาร์
วิธีการกำจัดการใช้สัญญาณรบกวนไม่ทางใดก็ทางหนึ่งเอฟเฟกต์ Doppler (ความถี่ของคลื่นที่สะท้อนจากวัตถุที่กำลังเข้าใกล้จะเพิ่มขึ้นและจากวัตถุที่แยกออกไปจะลดลง)
เรดาร์ที่ง่ายที่สุดที่สามารถตรวจจับเป้าหมายที่ถูกรบกวนได้คือ เรดาร์พร้อมการเลือกเป้าหมายที่กำลังเคลื่อนที่(PDS) - เรดาร์พัลส์ที่เปรียบเทียบการสะท้อนจากช่วงการทำซ้ำของพัลส์มากกว่าสองช่วงขึ้นไป เป้าหมายใดๆ ที่เคลื่อนที่สัมพันธ์กับเรดาร์จะทำให้เกิดการเปลี่ยนแปลงในพารามิเตอร์สัญญาณ (ระยะใน Serial SDC) ในขณะที่สัญญาณรบกวนยังคงไม่เปลี่ยนแปลง การกำจัดสัญญาณรบกวนเกิดขึ้นโดยการลบการสะท้อนออกจากสองช่วงเวลาติดต่อกัน ในทางปฏิบัติ การกำจัดสัญญาณรบกวนสามารถทำได้ในอุปกรณ์พิเศษ - ตัวชดเชยผ่านช่วงเวลาหรืออัลกอริธึมในซอฟต์แวร์
ระบบปฏิบัติการ CRT มีจุดอ่อนพื้นฐาน: พวกมันมองไม่เห็นเป้าหมายที่มีความเร็ววงกลมเฉพาะ (ซึ่งทำให้เกิดการเปลี่ยนแปลงเฟส 360 องศาพอดี) และเป้าหมายดังกล่าวจะไม่ได้รับการถ่ายภาพ ความเร็วที่เป้าหมายหายไปจากเรดาร์จะขึ้นอยู่กับความถี่ในการทำงานของสถานีและอัตราการเกิดซ้ำของพัลส์ PRF สมัยใหม่ปล่อยพัลส์หลายอันที่อัตราการเกิดซ้ำที่แตกต่างกัน - ดังนั้น PRF อื่น ๆ จะจับความเร็วที่มองไม่เห็นในแต่ละอัตราการเกิดซ้ำของพัลส์
อีกวิธีหนึ่งในการกำจัดการรบกวนคือการใช้มา เรดาร์พัลส์-ดอปเปลอร์ซึ่งใช้การประมวลผลที่ซับซ้อนกว่าเรดาร์ที่มี SDC อย่างมาก
คุณสมบัติที่สำคัญของเรดาร์พัลส์-ดอปเปลอร์คือการเชื่อมโยงกันของสัญญาณ ซึ่งหมายความว่าสัญญาณและการสะท้อนที่ส่งจะต้องมีการพึ่งพาเฟสที่แน่นอน
โดยทั่วไปแล้ว เรดาร์พัลส์ดอปเปลอร์ถือว่าเหนือกว่าเรดาร์ MDT ในการตรวจจับเป้าหมายที่บินต่ำในบริเวณพื้นดินหลายๆ อัน และเป็นเทคนิคที่นิยมใช้ในเครื่องบินรบสมัยใหม่สำหรับการสกัดกั้นทางอากาศ/การควบคุมการยิง (ตัวอย่างคือ AN/APG-63, 65, เรดาร์ 66, 67 และ 70) ในเรดาร์ดอปเปลอร์สมัยใหม่ การประมวลผลส่วนใหญ่ดำเนินการโดยโปรเซสเซอร์ที่แยกจากกัน แบบฟอร์มดิจิทัลโดยใช้ตัวประมวลผลสัญญาณดิจิทัล โดยทั่วไปจะใช้อัลกอริธึม Fast Fourier Transform ที่มีประสิทธิภาพสูงเพื่อแปลงข้อมูลดิจิทัลของรูปแบบการสะท้อนกลับเป็นสิ่งที่สามารถจัดการได้มากขึ้นโดยอัลกอริธึมอื่น ตัวประมวลผลสัญญาณดิจิตอลมีความยืดหยุ่นมากเนื่องจากอัลกอริธึมที่ใช้ในอัลกอริธึมสามารถถูกแทนที่ด้วยอัลกอริธึมอื่น ๆ ได้อย่างรวดเร็วโดยเปลี่ยนเฉพาะโปรแกรมในหน่วยความจำของอุปกรณ์ ("เฟิร์มแวร์" ROM) ดังนั้นหากจำเป็นให้ปรับให้เข้ากับเทคนิคการรบกวนของศัตรูอย่างรวดเร็ว
ช่วงเรดาร์
| พิสัย | นิรุกติศาสตร์ | ความถี่ | ความยาวคลื่น | หมายเหตุ |
|---|---|---|---|---|
| เอชเอฟ | ภาษาอังกฤษ ความถี่สูง | 3-30 เมกะเฮิรตซ์ | 10-100 ม | เรดาร์หน่วยยามฝั่ง เรดาร์ "เหนือขอบฟ้า" |
| ป | ภาษาอังกฤษ ก่อนหน้า | < 300 МГц | > 1 ม | ใช้ในเรดาร์ยุคแรก |
| วีเอชเอฟ | ภาษาอังกฤษ ความถี่สูงมาก | 50-330 เมกะเฮิรตซ์ | 0.9-6 ม | การตรวจจับระยะไกล การสำรวจโลก |
| ยูเอชเอฟ | ภาษาอังกฤษ ความถี่สูงพิเศษ | 300-1,000 เมกะเฮิรตซ์ | 0.3-1 ม | การตรวจจับในระยะไกล (เช่น การยิงปืนใหญ่), การสำรวจป่าไม้, พื้นผิวโลก |
| ล | ภาษาอังกฤษ ยาว | 1-2 กิกะเฮิร์ตซ์ | 15-30 ซม | การเฝ้าระวังและควบคุมการจราจรทางอากาศ |
| ส | ภาษาอังกฤษ สั้น | 2-4 กิกะเฮิร์ตซ์ | 7.5-15 ซม | การควบคุมการจราจรทางอากาศ อุตุนิยมวิทยา เรดาร์ทางทะเล |
| ค | ภาษาอังกฤษ ประนีประนอม | 4-8 กิกะเฮิร์ตซ์ | 3.75-7.5 ซม | อุตุนิยมวิทยา การกระจายเสียงผ่านดาวเทียม พิสัยกลางระหว่าง X และ S |
| เอ็กซ์ | 8-12 กิกะเฮิร์ตซ์ | 2.5-3.75 ซม | การควบคุมอาวุธ การนำขีปนาวุธ เรดาร์ทางทะเล สภาพอากาศ การทำแผนที่ความละเอียดปานกลาง ในสหรัฐอเมริกา แถบความถี่ 10.525 GHz ± 25 MHz ถูกใช้ในเรดาร์ของสนามบิน | |
| คุณ | ภาษาอังกฤษ ภายใต้เค | 12-18 กิกะเฮิร์ตซ์ | 1.67-2.5 ซม | การทำแผนที่ ความละเอียดสูง, การวัดความสูงของดาวเทียม |
| เค | เยอรมัน เคิร์ซ- "สั้น" | 18-27 กิกะเฮิร์ตซ์ | 1.11-1.67 ซม | การใช้งานมีจำกัดเนื่องจากการดูดซับไอน้ำอย่างรุนแรง ดังนั้นจึงใช้ช่วง K u และ K a K-band ใช้สำหรับการตรวจจับเมฆในเรดาร์จราจรของตำรวจ (24.150 ± 0.100 GHz) |
| เค | ภาษาอังกฤษ เหนือเค | 27-40 กิกะเฮิร์ตซ์ | 0.75-1.11 ซม | การทำแผนที่ การควบคุมการจราจรทางอากาศระยะสั้น เรดาร์พิเศษควบคุมกล้องจราจร (34.300 ± 0.100 GHz) |
| มม | 40-300 กิกะเฮิร์ตซ์ | 1-7.5 มม | คลื่นมิลลิเมตร แบ่งออกเป็น 2 ช่วงดังนี้ | |
| วี | 40-75 กิกะเฮิร์ตซ์ | 4.0-7.5 มม | อุปกรณ์การแพทย์ EHF ที่ใช้ในการกายภาพบำบัด | |
| ว | 75-110 กิกะเฮิร์ตซ์ | 2.7-4.0 มม | เซ็นเซอร์ในยานพาหนะอัตโนมัติทดลอง การวิจัยสภาพอากาศที่มีความแม่นยำสูง |
เรดาร์รอง
"เรดาร์รอง" ใช้ในการบินเพื่อระบุเครื่องบิน คุณสมบัติหลักคือการใช้ช่องสัญญาณแบบแอคทีฟบนเครื่องบิน
หลักการทำงานของเรดาร์รองค่อนข้างแตกต่างจากหลักเรดาร์หลัก สถานีเรดาร์ทุติยภูมิประกอบด้วยส่วนประกอบต่างๆ ดังต่อไปนี้: เครื่องส่ง เสาอากาศ เครื่องกำเนิดเครื่องหมายแอซิมัท เครื่องรับ ตัวประมวลผลสัญญาณ ไฟแสดง และเครื่องส่งผ่านสัญญาณเครื่องบินพร้อมเสาอากาศ
เครื่องส่ง- ทำหน้าที่ปล่อยพัลส์คำขอเข้าสู่เสาอากาศที่ความถี่ 1,030 MHz
เสาอากาศ- ทำหน้าที่ปล่อยและรับสัญญาณสะท้อน ตามมาตรฐานเรดาร์รองของ ICAO เสาอากาศจะส่งสัญญาณที่ความถี่ 1,030 MHz และรับที่ความถี่ 1,090 MHz
เครื่องกำเนิดเครื่องหมาย Azimuth- ทำหน้าที่ในการสร้าง เครื่องหมายราบ (Azimuth เปลี่ยนชีพจรหรือ ACP) และการสร้าง เครื่องหมายภาคเหนือ (Azimuth Reference Pulse หรือ ARP- ในการปฏิวัติครั้งหนึ่ง เสาอากาศเรดาร์มีการสร้างเครื่องหมายอะซิมุทขนาดเล็ก 4,096 อัน (สำหรับระบบเก่า) หรือเครื่องหมายอะซิมุทขนาดเล็ก 16,384 อัน (สำหรับระบบใหม่ เรียกอีกอย่างว่าเครื่องหมายอะซิมุทขนาดเล็กที่ปรับปรุงแล้ว (พัลส์ Azimuth Change ที่ปรับปรุงแล้วหรือ IACP) รวมถึงหนึ่งเครื่องหมายทิศเหนือ เครื่องหมายทิศเหนือมาจาก เครื่องกำเนิดเครื่องหมายแอซิมัทที่ นี่คือตำแหน่งของเสาอากาศเมื่อหันไปทางทิศเหนือ และเครื่องหมายแอซิมัทขนาดเล็กใช้วัดมุมการหมุนของเสาอากาศ
ผู้รับ- ทำหน้าที่รับพัลส์ที่ความถี่ 1,090 MHz
ตัวประมวลผลสัญญาณ- ทำหน้าที่ประมวลผลสัญญาณที่ได้รับ
ตัวบ่งชี้- ทำหน้าที่ระบุข้อมูลที่ประมวลผล
ทรานสปอนเดอร์เครื่องบินพร้อมเสาอากาศ- ทำหน้าที่ส่งสัญญาณวิทยุพัลส์ที่มีข้อมูลเพิ่มเติมกลับไปยังเรดาร์เมื่อได้รับสัญญาณวิทยุร้องขอ
หลักการทำงานของเรดาร์ทุติยภูมิคือการใช้พลังงานของทรานสปอนเดอร์ของเครื่องบินเพื่อกำหนดตำแหน่งของเครื่องบิน เรดาร์ฉายรังสีในพื้นที่โดยรอบด้วยพัลส์การสอบปากคำที่ความถี่ P1 และ P3 รวมถึงพัลส์ปราบปราม P2 ที่ความถี่ 1,030 MHz เครื่องบินที่ติดตั้งช่องสัญญาณดาวเทียมซึ่งอยู่ในพื้นที่ครอบคลุมของลำแสงสอบปากคำ เมื่อได้รับพัลส์การสอบปากคำแล้ว หากเงื่อนไข P1,P3>P2 มีผล ให้ตอบสนองต่อเรดาร์ที่ร้องขอด้วยชุดพัลส์เข้ารหัสที่ความถี่ 1,090 MHz ซึ่งประกอบด้วย ข้อมูลเพิ่มเติมเกี่ยวกับหมายเลขกระดาน ความสูง และอื่นๆ การตอบสนองของทรานสปอนเดอร์ของเครื่องบินขึ้นอยู่กับโหมดคำขอเรดาร์ และโหมดคำขอถูกกำหนดโดยช่วงเวลาระหว่างพัลส์คำขอ P1 และ P3 ตัวอย่างเช่น ในโหมดคำขอ A (โหมด A) ช่วงเวลาระหว่างคำขอสถานี พัลส์ P1 และ P3 คือ 8 ไมโครวินาที และเมื่อได้รับคำขอดังกล่าว อากาศยานทรานสปอนเดอร์จะเข้ารหัสหมายเลขเครื่องบินของตนในพัลส์ตอบสนอง
ในโหมดคำขอ C (โหมด C) ช่วงเวลาระหว่างพัลส์คำขอของสถานีคือ 21 ไมโครวินาที และเมื่อได้รับคำขอดังกล่าว ทรานสปอนเดอร์ของเครื่องบินจะเข้ารหัสระดับความสูงในพัลส์ตอบสนอง เรดาร์ยังสามารถส่งคำขอในโหมดผสม เช่น โหมด A, โหมด C, โหมด A, โหมด C โดยมุมราบของเครื่องบินจะถูกกำหนดโดยมุมการหมุนของเสาอากาศ ซึ่งจะถูกกำหนดโดยการคำนวณ เครื่องหมายราบขนาดเล็ก.
ช่วงถูกกำหนดโดยความล่าช้าของการตอบกลับที่ได้รับ หากเครื่องบินอยู่ในระยะของกลีบด้านข้าง ไม่ใช่ลำแสงหลัก หรือตั้งอยู่ด้านหลังเสาอากาศ เมื่อได้รับคำขอจากเรดาร์แล้ว ช่องสัญญาณของเครื่องบินจะได้รับสภาวะที่พัลส์ P1, P3 ที่อินพุต สัญญาณที่ได้รับจากช่องสัญญาณจะถูกประมวลผลโดยเครื่องรับเรดาร์ จากนั้นไปที่ตัวประมวลผลสัญญาณ ซึ่งประมวลผลสัญญาณและให้ข้อมูลแก่ผู้ใช้ปลายทาง และ (หรือ) ไปยังตัวบ่งชี้การควบคุม ข้อดีของเรดาร์รอง: คลื่นวิทยุที่ส่งเข้าสู่อวกาศเดินทางด้วยความเร็วแสง แต่ทันทีที่พวกเขาพบกับวัตถุระหว่างทาง เช่น เครื่องบินหรือเรือ วัตถุเหล่านั้นจะสะท้อนกลับจากวัตถุนั้นแล้วกลับมา ด้วยเหตุนี้จึงสามารถตรวจจับวัตถุที่อยู่ห่างไกลต่างๆ สังเกตและกำหนดพิกัดและพารามิเตอร์ของวัตถุเหล่านั้นได้ด้วยความช่วยเหลือของพวกเขา เรียกว่าการตรวจจับตำแหน่งของวัตถุโดยใช้คลื่นวิทยุ เรดาร์. อเล็กซานเดอร์ สเตปาโนวิช โปปอฟ
ในปี พ.ศ. 2440 ในระหว่างการทดลองการสื่อสารทางวิทยุระหว่างการขนส่งทางทะเล "ยุโรป" และเรือลาดตระเวน "แอฟริกา" ซึ่งดำเนินการโดยนักฟิสิกส์ชาวรัสเซีย Alexander Stepanovich Popov ปรากฏการณ์ที่น่าสนใจถูกค้นพบ ปรากฎว่าการแพร่กระจายคลื่นแม่เหล็กไฟฟ้าที่ถูกต้องนั้นถูกบิดเบือนโดยวัตถุโลหะทั้งหมด - เสากระโดงท่อเกียร์ทั้งบนเรือที่ส่งสัญญาณและบนเรือที่ได้รับสัญญาณ เมื่อเรือลาดตระเวน "Lieutenant Ilyin" ปรากฏตัวระหว่างเรือเหล่านี้ การสื่อสารทางวิทยุระหว่างเรือทั้งสองลำก็หยุดชะงัก นี่คือวิธีการค้นพบปรากฏการณ์การสะท้อนของคลื่นวิทยุจากตัวเรือ แต่หากสามารถสะท้อนคลื่นวิทยุจากเรือได้ เรือก็สามารถตรวจจับได้ด้วยความช่วยเหลือ และในขณะเดียวกันก็มีเป้าหมายอื่นๆ และในปี 1904 Christian Hülsmeier นักประดิษฐ์ชาวเยอรมันได้สมัครใช้เรดาร์ตัวแรก และในปี 1905 ได้รับสิทธิบัตรการใช้ผลของการสะท้อนคลื่นวิทยุเพื่อค้นหาเรือ และอีกหนึ่งปีต่อมาในปี พ.ศ. 2449 เขาเสนอให้ใช้เอฟเฟกต์นี้เพื่อกำหนดระยะห่างจากวัตถุที่สะท้อนคลื่นวิทยุ คริสเตียน ฮุลสไมเออร์
ในปี พ.ศ. 2477 นักฟิสิกส์ชาวสก็อตแลนด์ โรเบิร์ต อเล็กซานเดอร์ วัตสัน-วัตต์ ได้รับสิทธิบัตรสำหรับการประดิษฐ์ระบบตรวจจับวัตถุในอากาศ และได้สาธิตอุปกรณ์ดังกล่าวชิ้นแรกๆ ในปีต่อมา โรเบิร์ต อเล็กซานเดอร์ วัตสัน-วัตต์
การกำหนดตำแหน่งของบางสิ่งบางอย่างเรียกว่า ที่ตั้ง- เพื่อจุดประสงค์นี้เทคโนโลยีจึงใช้อุปกรณ์ที่เรียกว่า ตัวระบุตำแหน่ง- เครื่องระบุตำแหน่งจะปล่อยพลังงานบางประเภท เช่น เสียงหรือสัญญาณแสง ไปยังวัตถุที่ต้องการ จากนั้นรับสัญญาณที่สะท้อนจากวัตถุนั้น เรดาร์ใช้คลื่นวิทยุเพื่อการนี้ ที่จริงแล้วเรดาร์หรือสถานีเรดาร์ (เรดาร์) เป็นระบบที่ซับซ้อน การออกแบบเรดาร์ที่แตกต่างกันอาจแตกต่างกันไป แต่หลักการทำงานของเรดาร์นั้นเหมือนกัน เครื่องส่งสัญญาณวิทยุส่งคลื่นวิทยุสู่อวกาศ เมื่อไปถึงเป้าหมายแล้ว ก็สะท้อนจากมันเหมือนกระจกแล้วกลับมา เรดาร์ประเภทนี้เรียกว่าแอคทีฟ ส่วนประกอบหลักของเรดาร์ (เรดาร์) ได้แก่ เครื่องส่ง เสาอากาศ สวิตช์เสาอากาศ เครื่องรับ และตัวบ่งชี้ ตามวิธีการปล่อยคลื่นวิทยุ เรดาร์จะแบ่งออกเป็นแบบพัลส์และแบบต่อเนื่อง เรดาร์พัลส์ทำงานอย่างไร เครื่องส่งคลื่นวิทยุจะเปิดในช่วงเวลาสั้นๆ ดังนั้นคลื่นวิทยุจึงถูกปล่อยออกมาเป็นพัลส์ พวกมันเข้าไปในเสาอากาศซึ่งอยู่ที่จุดโฟกัสของกระจกรูปทรงพาราโบลาลอยด์ นี่เป็นสิ่งจำเป็นเพื่อให้คลื่นวิทยุแพร่กระจายไปในทิศทางที่แน่นอน การทำงานของเรดาร์นั้นคล้ายคลึงกับการทำงานของสปอตไลท์ซึ่งมีรังสีพุ่งขึ้นไปบนท้องฟ้าในทำนองเดียวกันและให้แสงสว่างเพื่อค้นหาวัตถุที่ต้องการ แต่งานสปอตไลท์ก็จำกัดอยู่เพียงเท่านี้ และเรดาร์ไม่เพียงแต่ส่งคลื่นวิทยุเท่านั้น แต่ยังรับสัญญาณที่สะท้อนจากวัตถุที่พบด้วย (เสียงสะท้อนของวิทยุ) ฟังก์ชันนี้ดำเนินการโดยผู้รับ เสาอากาศพัลส์เรดาร์ทำงานสำหรับการส่งสัญญาณหรือการรับ มีสวิตช์เพื่อการนี้ ทันทีที่ส่งสัญญาณวิทยุ เครื่องส่งจะปิดและเครื่องรับจะเปิดขึ้น มีการหยุดชั่วคราวในระหว่างที่เรดาร์ดูเหมือนจะ "ฟัง" การออกอากาศและรอเสียงสะท้อนจากวิทยุ และทันทีที่เสาอากาศจับสัญญาณที่สะท้อน เครื่องรับจะปิดทันทีและเครื่องส่งสัญญาณจะเปิดขึ้น และอื่นๆ นอกจากนี้ เวลาหยุดชั่วคราวอาจนานกว่าระยะเวลาพัลส์หลายเท่า ดังนั้นสัญญาณที่ส่งและรับจะถูกแยกออกจากกันตามเวลา สัญญาณวิทยุที่ได้รับจะถูกขยายและประมวลผล ตัวบ่งชี้ซึ่งในกรณีที่ง่ายที่สุดคือการแสดงผล จะแสดงข้อมูลที่ประมวลผลแล้ว เช่น ขนาดของวัตถุหรือระยะทางถึงวัตถุ หรือตัวเป้าหมายเองและสภาพแวดล้อม คลื่นวิทยุเดินทางผ่านอวกาศด้วยความเร็วแสง ดังนั้นการรู้เวลา ที
ตั้งแต่การปล่อยพัลส์สัญญาณวิทยุไปจนถึงการย้อนกลับ สามารถกำหนดระยะห่างจากวัตถุได้ ร=
คˑ
ที/2
, ที่ไหน กับ
– ความเร็วแสง. เรดาร์คลื่นต่อเนื่อง
ปล่อยคลื่นวิทยุความถี่สูงอย่างต่อเนื่อง ดังนั้นเสาอากาศจึงรับสัญญาณที่สะท้อนอย่างต่อเนื่อง ในการทำงาน เรดาร์ดังกล่าวใช้เอฟเฟกต์ดอปเปลอร์ แก่นแท้ของผลกระทบนี้คือ ความถี่ของสัญญาณที่สะท้อนจากวัตถุที่เคลื่อนที่เข้าหาเรดาร์จะสูงกว่าความถี่ของสัญญาณที่สะท้อนจากวัตถุที่เคลื่อนที่ออกไปจากเรดาร์ แม้ว่าความถี่ของสัญญาณที่ปล่อยออกมาจะคงที่ก็ตาม ดังนั้นจึงใช้เรดาร์ดังกล่าวเพื่อกำหนดพารามิเตอร์ของวัตถุที่กำลังเคลื่อนที่ ตัวอย่างของเรดาร์ที่ใช้เอฟเฟกต์ดอปเปลอร์คือเรดาร์ที่ตำรวจจราจรใช้เพื่อกำหนดความเร็วของยานพาหนะที่กำลังเคลื่อนที่ ในการค้นหาวัตถุ ลำแสงทิศทางของเสาอากาศเรดาร์จะสแกนพื้นที่ อธิบายวงกลมเต็ม หรือเลือกเซกเตอร์เฉพาะ มันสามารถพุ่งไปตามเส้นเกลียวเป็นเกลียว มุมมองอาจเป็นทรงกรวยหรือเชิงเส้นก็ได้ ทุกอย่างขึ้นอยู่กับงานที่เขาต้องทำ หากจำเป็นต้องตรวจสอบเป้าหมายที่กำลังเคลื่อนที่ที่เลือกอยู่ตลอดเวลา เสาอากาศเรดาร์จะพุ่งไปที่เป้าหมายเสมอและหมุนหลังจากนั้นโดยใช้ระบบติดตามพิเศษ สถานีเรดาร์ถูกใช้ครั้งแรกในช่วงสงครามโลกครั้งที่สองเพื่อตรวจจับเครื่องบินทหาร เรือ และเรือดำน้ำ ดังนั้น ณ สิ้นเดือนธันวาคม พ.ศ. 2486 เรดาร์ที่ติดตั้งบนเรืออังกฤษจึงช่วยตรวจจับเรือรบฟาสซิสต์ลำหนึ่งที่ออกจากท่าเรืออัลเทนฟิออร์ดในนอร์เวย์ในเวลากลางคืนเพื่อสกัดกั้นเรือทหาร ไฟบนเรือรบนั้นแม่นยำมาก และในไม่ช้ามันก็จมลง เรดาร์ชุดแรกไม่ก้าวหน้ามากนัก ต่างจากเรดาร์สมัยใหม่ที่ปกป้องน่านฟ้าจากการโจมตีทางอากาศและการโจมตีด้วยขีปนาวุธได้อย่างน่าเชื่อถือ โดยจดจำเป้าหมายทางทหารได้เกือบทั้งหมดทั้งบนบกและในทะเล ระบบนำทางด้วยเรดาร์ใช้ในการนำวิถีขีปนาวุธกลับบ้านเพื่อการรับรู้ภูมิประเทศ เรดาร์ติดตามการบินของขีปนาวุธข้ามทวีป เรดาร์ยังพบการประยุกต์ใช้ในชีวิตพลเรือนด้วย นักบินที่นำทางเรือผ่านช่องแคบแคบ ๆ และผู้ควบคุมการจราจรทางอากาศที่สนามบินที่ควบคุมการบินของเครื่องบินพลเรือนจะทำไม่ได้หากไม่มีพวกเขา สิ่งเหล่านี้ขาดไม่ได้เมื่อล่องเรือในสภาพทัศนวิสัยที่จำกัด - ในเวลากลางคืนหรือในสภาพอากาศเลวร้าย ด้วยความช่วยเหลือของพวกเขา จึงมีการกำหนดภูมิประเทศของก้นทะเลและมหาสมุทร และศึกษาการปนเปื้อนของพื้นผิว นักอุตุนิยมวิทยาใช้เพื่อระบุแนวพายุฝนฟ้าคะนองและวัดความเร็วลมและเมฆ บนเรือประมง เรดาร์ช่วยตรวจจับฝูงปลา บ่อยครั้งที่มีการเรียกเรดาร์หรือสถานีเรดาร์ (เรดาร์) เรดาร์- และแม้ว่าตอนนี้คำนี้จะเป็นอิสระแล้ว แต่จริงๆ แล้วมันเป็นคำย่อที่เกิดจากคำในภาษาอังกฤษ” วิทยุการตรวจจับและตั้งแต่ »ซึ่งหมายถึง "การตรวจจับและกำหนดสัญญาณวิทยุ" และสะท้อนถึงแก่นแท้ของเรดาร์ เรดาร์ประกอบด้วยองค์ประกอบหลักดังต่อไปนี้: อุปกรณ์ส่งสัญญาณ ผู้รับ; สวิตช์เสาอากาศและอุปกรณ์เสาอากาศ อุปกรณ์เทอร์มินัล ซิงโครไนซ์ บล็อกไดอะแกรมของเรดาร์แสดงในรูปที่ 5.2 รูปที่ 5.2 บล็อกไดอะแกรมของสถานีเรดาร์ อุปกรณ์ส่งสัญญาณเรดาร์ได้รับการออกแบบเพื่อสร้างสัญญาณเสียงและส่งไปยังเสาอากาศ ผู้รับเรดาร์ได้รับการออกแบบมาเพื่อประมวลผลสัญญาณสะท้อนที่ได้รับจากเสาอากาศล่วงหน้า โดยแยกสัญญาณที่เป็นประโยชน์ออกจากส่วนผสมของสัญญาณและการรบกวน แปลงสัญญาณวิทยุให้เป็นสัญญาณวิดีโอ และส่งไปยังอุปกรณ์ปลายทาง สวิตช์เสาอากาศออกแบบมาเพื่อเชื่อมต่อเครื่องส่งกับเสาอากาศเมื่อส่งสัญญาณโพรบ และเชื่อมต่อเครื่องรับกับเสาอากาศเมื่อรับสัญญาณที่สะท้อน อุปกรณ์สิ้นสุดเพื่อวิเคราะห์สัญญาณที่เป็นประโยชน์ ประเภทของอุปกรณ์ปลายทางขึ้นอยู่กับประเภทของสัญญาณ (แอนะล็อกหรือดิจิทัล) ผู้รับข้อมูลเรดาร์ (ผู้ปฏิบัติงาน อุปกรณ์กำหนดตำแหน่งอัตโนมัติ คอมพิวเตอร์ ฯลฯ) และประเภทของข้อมูลเรดาร์ ซิงโครไนซ์ให้ลำดับการทำงานขององค์ประกอบเรดาร์ที่กำหนด ตัวอย่างเช่นในเรดาร์ทั่วไปที่มีโหมดการทำงานแบบพัลซิ่งซิงโครไนเซอร์จะทำหน้าที่ต่อไปนี้: การประสานงานของโมเมนต์การก่อตัวของพัลส์โพรบกับโมเมนต์เริ่มต้นฐานเวลาของตัวบ่งชี้หรือการนับศูนย์ของอุปกรณ์คอมพิวเตอร์ การประสานงานของตำแหน่งของรูปแบบการแผ่รังสีของเสาอากาศในอวกาศด้วยการกวาดตัวบ่งชี้หรือการอ่านค่าเป็นศูนย์ของอุปกรณ์คอมพิวเตอร์ การกำหนดช่วงเวลาที่เครื่องรับเปิดและช่วงเวลาในการทำงาน ในกรณีนี้วิธีการซิงโครไนซ์ต่อไปนี้เป็นไปได้โดยพื้นฐาน: 1. การซิงโครไนซ์จากเครื่องส่งสัญญาณไปยังอุปกรณ์ปลายทาง ในเรดาร์ดังกล่าว โมเมนต์ของการก่อตัวของพัลส์การตรวจวัดจะกำหนดช่วงเวลาของการเริ่มต้นการกวาดเวลาของตัวบ่งชี้หรือโมเมนต์ที่ทำให้อุปกรณ์คอมพิวเตอร์เป็นศูนย์ ข้อดีของวิธีการซิงโครไนซ์นี้คือความไม่เสถียรของอัตราการเกิดซ้ำของพัลส์โพรบของเครื่องส่งสัญญาณไม่ส่งผลต่อความแม่นยำของการวัดเรดาร์ อย่างไรก็ตาม เรดาร์ดังกล่าวมีลักษณะเฉพาะคือความไม่เสถียรในการเปิดตัวอุปกรณ์ปลายทางซึ่งยากต่อการกำจัดโดยสิ้นเชิง 2. การซิงโครไนซ์จากอุปกรณ์ปลายทางไปยังเครื่องส่งสัญญาณ ในกรณีนี้ การทำงานของเทอร์มินัลและอุปกรณ์ส่งสัญญาณจะถูกควบคุมโดยเครื่องกำเนิดไฟฟ้าที่มีความเสถียรสูงซึ่งรวมอยู่ในอุปกรณ์เทอร์มินัล ด้วยเหตุนี้ จึงทำให้การวัดเรดาร์มีความแม่นยำสูง อย่างไรก็ตาม ปัญหาเกิดขึ้นเมื่อเปลี่ยนอัตราการเกิดซ้ำของพัลส์การตรวจวัด 3. การซิงโครไนซ์โดยใช้ออสซิลเลเตอร์ควอตซ์ที่มีความเสถียรสูงแยกต่างหาก ซึ่งไม่ได้เป็นส่วนหนึ่งของอุปกรณ์ส่งสัญญาณหรือปลายทาง วิธีการซิงโครไนซ์นี้ใช้ในเรดาร์สมัยใหม่ส่วนใหญ่ ซึ่งมักจะให้ความสามารถในการเปลี่ยนอัตราการเกิดซ้ำของพัลส์ที่ตรวจวัดระหว่างการทำงานของสถานี นี่เป็นสิ่งจำเป็นเพื่อให้แน่ใจว่าเรดาร์จะป้องกันสัญญาณรบกวนเมื่อทำงานในสภาวะที่มีการรบกวนด้วยเรดาร์แบบพาสซีฟหรือแบบแอคทีฟ บล็อกไดอะแกรมของเรดาร์ส่วนใหญ่ขึ้นอยู่กับวัตถุประสงค์ ประเภทของสัญญาณโพรบ (พัลส์หรือต่อเนื่อง) และพารามิเตอร์มอดูเลตของสัญญาณวิทยุ อย่างไรก็ตาม ในกรณีทั่วไป ขั้นตอนการประมวลผลสัญญาณวิทยุในเรดาร์จะต้องสอดคล้องไม่เพียงแต่กับประเภทของสัญญาณเสียงเท่านั้น แต่ยังรวมถึงประเภทของการรบกวนด้วย ดังนั้น แผนภาพบล็อกเรดาร์จะต้องคำนึงถึงแหล่งที่มาของการรบกวนทางอิเล็กทรอนิกส์แบบแอคทีฟและพาสซีฟด้วย งานนี้ทำให้การทำงานของเรดาร์ซับซ้อนขึ้นเพราะว่า การรบกวนทำให้เกิดการบิดเบือนของสัญญาณที่สะท้อนจากเป้าหมาย และทำให้ข้อมูลเรดาร์ที่เป็นประโยชน์สูญหาย ดังนั้นในกระบวนการประมวลผลสัญญาณที่สะท้อน พวกเขาจึงพยายามระงับการรบกวน ซึ่งทำได้โดยการแนะนำอุปกรณ์ป้องกันการรบกวนทางอิเล็กทรอนิกส์ในแผนภาพบล็อกเรดาร์ดูเพิ่มเติม
วรรณกรรม
บทความ ลิงค์
หมายเหตุ
โซเวียตและรัสเซีย สถานีเรดาร์
เรดาร์ของกองทัพเทคนิควิทยุ
"มาตุภูมิ-1" "มาตุภูมิ-2" "พี-3""P-8 โวลก้า" "P-10 "โวลก้า-เอ""“P-14” “P-18 “Terek”” “P-20” “P-30” “P-35 “การระบายน้ำ”” “P-37” “P-40” “P-70 “Lena-M” » “เสียงสะท้อน-N(E)” “แหวน” “วรรณะ” "5N59.19Zh6.35D6/36D6""คาสต้า-2อี" "แกมมา-S1E" "แกมมา-ดีอี" "กลาโหม-14""5N87" "เดสนา-เอ็ม" "ปฏิปักษ์-GE"
เครื่องวัดระยะสูงแบบวิทยุ
"PRV-9" "PRV-10" "PRV-11" "PRV-13" "พีอาร์วี-16""พีอาร์วี-17"
เรดาร์ป้องกันภัยทางอากาศพิเศษ
P-15 P-19 1L117M Desna-M 76N6 96L6E
สถานีเรดาร์ระยะไกล
Dnepr Dnestr-M Daryal Krona Danube Don-2N Duga 1 Volga Voronezh-M/DM Vitim
เรดาร์การบิน
Gneiss-2 Gneiss-5 RP-5 Emerald-5 Liana Vega-M Bumblebee E-801 Eye N007 Barrier N010 ด้วง ( 8-II / 27 / M(ส)(อี) / (ม)F(อี) / เอ(อี)) N011 บาร์ ( ม/29) N035 ไอร์บิส N050
เรดาร์ทางเรือ
Redoubt-K Guys-1 Guys-2 Neptune Foot-N Reef Don P-500 Frigate Boletus Furke Monument-A Pal-N 3Р41 3Р95 ธง Podkat
เคาน์เตอร์แบตเตอรี่และเรดาร์อื่นๆ
สวนสัตว์นกกระสา Farah Credo
เรดาร์ชายฝั่ง
เรดาร์ปรากฏขึ้นได้อย่างไร?



เรดาร์ทำงานอย่างไร?

การประยุกต์ใช้เรดาร์